6.7. Контроль на основе свойств самодвойственных функций
Рассмотренные в § 6.2–6.6 методы контроля КС основаны на использовании свойств кодов с обнаружением ошибок. С другой стороны, их можно также рассматривать как методы, использующие свойства особенных классов булевых функций. В методе паритета используются свойства линейных функций, к классу которых относится функция паритета. Контроль по постоянному весу связан с монотонными функциями. В этом случае обнаруживаются все монотонные ошибки, а тестеры описываются монотонными функциями. При контроле по коду с суммированием используются свойства мажоритарных и линейных функций. Полезными (с точки зрения контроля) свойствами обладают также самодвойственные функции [29, 46, 48].
Функция ![]() называется самодвойственной, если
называется самодвойственной, если
![]() =
= ![]() .
(6.11)
.
(6.11)
Входные наборы (![]() ) и
) и ![]() называются
противоположными. Тогда из равенства (6.11) следует, что самодвойственная
функция имеет противоположные значения на противоположных наборах. В таблице
истинности противоположные наборы расположены симметрично относительно средней
линии. Например, в табл. 6.16 такие наборы составляют пары (0,7), (1,6), (2,5)
и (3,4). В этой таблице задана одна из возможных самодвойственных функций от
трех переменных
называются
противоположными. Тогда из равенства (6.11) следует, что самодвойственная
функция имеет противоположные значения на противоположных наборах. В таблице
истинности противоположные наборы расположены симметрично относительно средней
линии. Например, в табл. 6.16 такие наборы составляют пары (0,7), (1,6), (2,5)
и (3,4). В этой таблице задана одна из возможных самодвойственных функций от
трех переменных ![]() .
.
Т а б л и ц а 6.16
|
№ |
|
|
|
0 |
0 0 0 |
1 |
|
1 |
0 0 1 |
0 |
|
2 |
0 1 0 |
1 |
|
3 |
0 1 1 |
1 |
|
4 |
1 0 0 |
0 |
|
5 |
1 0 1 |
0 |
|
6 |
1 1 0 |
1 |
|
7 |
1 1 1 |
0 |
Если выходы ДУ описываются самодвойственными функциями (СД-функциями), то такое ДУ называют СД-устройством. Например, таким является полный сумматор (см. рис. 6.34), так как его выходы S и С описываются соответственно линейной и мажоритарной функциями от трех переменных, которые принадлежат к классу СД-функций (см. табл. 6.13). На рис. 6.39 показана схема организации контроля самодвойственного ДУ.
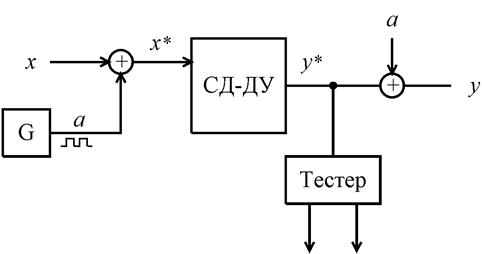
Рис.6.39. Схема контроля самодвойственного устройства
Входной сигнал х преобразуется в
самодвойственный (или альтернативный) сигнал ![]() ,
который имеет временное парафазное представление (см. рис. 6.40).
,
который имеет временное парафазное представление (см. рис. 6.40).
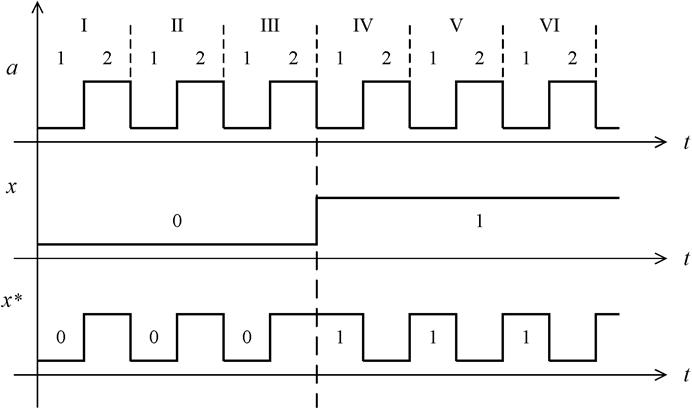
Рис.6.40. Представление самодвойственного сигнала
Преобразование осуществляется при
помощи элемента М2, на один вход которого подается переменная х, а на другой –
непрерывная последовательность импульсов ![]() ,
формируемая внешним генератором Г. Периоды последовательности
,
формируемая внешним генератором Г. Периоды последовательности ![]() (обозначены римскими цифрами) содержат два
такта или две фазы (обозначены арабскими цифрами). В информационном такте 1
значение сигнала
(обозначены римскими цифрами) содержат два
такта или две фазы (обозначены арабскими цифрами). В информационном такте 1
значение сигнала ![]() равно значению исходного сигнала
х, а в контрольном
такте 2 значение
равно значению исходного сигнала
х, а в контрольном
такте 2 значение ![]() инверсно значению х. При такой организации
входов в соседних тактах (информационном и контрольном) на входы схемы будут поступать
противоположные входные наборы
инверсно значению х. При такой организации
входов в соседних тактах (информационном и контрольном) на входы схемы будут поступать
противоположные входные наборы ![]() (
(![]() )
и
)
и ![]() . Выходной сигнал
. Выходной сигнал ![]() в
этом случае на основании свойства (6.11) СД-функций, представляет собой
импульсную периодическую последовательность, т.е. также является альтернативным
сигналом. Для перевода альтернативного сигнала
в
этом случае на основании свойства (6.11) СД-функций, представляет собой
импульсную периодическую последовательность, т.е. также является альтернативным
сигналом. Для перевода альтернативного сигнала ![]() в постоянный
сигнал
в постоянный
сигнал ![]() осуществляется обратное преобразование при
помощи сигнала
осуществляется обратное преобразование при
помощи сигнала ![]() (см. рис. 6.39).
(см. рис. 6.39).
Если в СД-устройстве возникает неисправность, то на его выходе реализуется ошибочная функция, которая не будет принадлежать классу СД-функций. В этом случае неисправность обнаруживается за счет нарушения парафазности в одном из периодов выходной импульсной последовательности. На рис. 6.41 приведен пример об- наруживаемой ошибки.
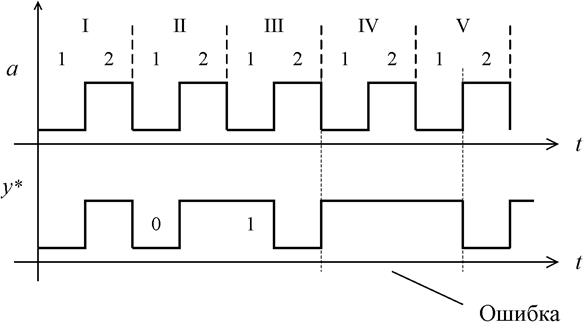
Рис.6.41. Импульсная последовательность с ошибкой
В периоде IV
сигнал ![]() в информационном и контрольном тактах
имеет одно и то же значение.
в информационном и контрольном тактах
имеет одно и то же значение.
На данном входном
наборе ![]() неисправность в самодвойственной схеме не
обнаруживается тогда и только тогда, когда она искажает выходной сигнал
неисправность в самодвойственной схеме не
обнаруживается тогда и только тогда, когда она искажает выходной сигнал ![]() на обоих противоположных наборах
на обоих противоположных наборах ![]() и
и ![]() . В
этом случае во время соответствующего периода импульсной последовательности
ошибочного сигнала
. В
этом случае во время соответствующего периода импульсной последовательности
ошибочного сигнала ![]() не происходит нарушения
парафазности сигнала (см. рис. 6.42), т.к. сигнал
не происходит нарушения
парафазности сигнала (см. рис. 6.42), т.к. сигнал ![]() искажается
и в информационном (первом) и в контрольном (втором) тактах. В реальных схемах
количество таких неисправностей невелико.
искажается
и в информационном (первом) и в контрольном (втором) тактах. В реальных схемах
количество таких неисправностей невелико.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.