2.4 Технология производства работ одноковшовыми экскаваторами
2.4.1 Назначение и сравнительная характеристика экскаваторов
Экскаватор одноковшовый - это самоходная землеройная машина циклического действия, предназначенная для разработки грунта I-IV группы с погрузкой в транспортные средства или перемещением в отвал.
Экскаваторы при сравнении их с землеройно-транспортными машинами имеют следующие преимущества:
- возможность работы в грунтах III-IV группы без предварительного рыхления;
- меньшая стоимость производства работ на сосредоточенных массивах грунта;
- возможность разработки грунта в трудных условиях (из-под воды, в глубоких котлованах с крутыми стенками, в колодцах и т. д.).
Недостатки использования экскаваторов:
- повышенная удельная металлоемкость и энергоемкость;
- повышенная удельная мощность;
- удельная выработка меньше, чем в комплектах землеройно-транспортных машин.
Для возведения земляного полотна автомобильных дорог используются строительные универсальные экскаваторы вместимостью ковша до 2,5-4,0 м3. До 80 % общего объема экскавационных работ в настоящее время выполняют экскаваторы с гидравлической системой управления рабочим оборудованием,
Преимущества гидравлических экскаваторов:
- удельная масса на 1 м3 ковша в 2 раза меньше, чем у канатно-балочных;
- усилие резания на кромке ковша в 3-4 раза выше, чем у механических;
- удельный расход энергии в 1,5-2 раза меньше, чем у механических;
- большая маневренность обеспечивает более рациональные рабочие движения
2.42 Рабочее место и рабочий цикл одноковшовых экскаваторов
Рабочим местом экскаватора является забой - пространство с работающим экскаватором, ограниченное по высоте (глубине) высотой (глубиной) копания грунта, а по ширине - боковыми стенками (бортами), конфигурация которых зависит от параметров рабочего оборудования.
По мере отработки грунта забой перемещается в пространстве, а за экскаватором остается траншея определенной формы, называемая проходкой.
Форма и размеры проходок зависят от размеров возводимого сооружения типа рабочего оборудования экскаватора, а также от его размерных параметров.
Рабочий цикл одноковшового экскаватора состоит из 4-х основных элементов:
- набор грунта;
- поворот на разгрузку;
- разгрузка;
- обратный ход.
Наиболее продолжительными являются второй и четвертый элементы цикла, зависящие от угла поворота экскаватора. Поэтому при проектировании проходок разворот под разгрузку стремятся свести к минимуму.
2.43 Параметры забоев и проходок для экскаваторов с оборудованием прямая лопата
Для работы экскаватора прямая лопата используются проходки:
- боковая одноярусная;
- боковая двухъярусная;
- лобовая;
- лобовая уширенная.
Наиболее эффективной является боковая двухъярусная проходка, которая обеспечивает незначительный угол поворота в сторону транспортного средства без опускания рукояти при разгрузке (рисунок 2.16).
Наибольшая высота копания регламентирует максимальную высоту забоя при работе экскаватора с грунтами в естественном состоянии. Для разрыхленных скальных грунтов при равномерном рыхлении, исключающем образована козырьков, высоту забоя допустимо увеличивать до 1,5 Н.
Наименьшая высота забоя определяется условием наполнения ковша с «шапкой» за одно рабочее движение рукояти. Для экскаваторов с ковшами вместимостью 0,5-2,5 м3, применяемых на сосредоточенных работах по возведению земляного полотна, наименьшая высота забоя в грунтах I, II групп трудности разработки находится в границах 2-3 м, в грунтах III группы - 3,5-4,5 м, в грунтах IV группы - 5-6 м.
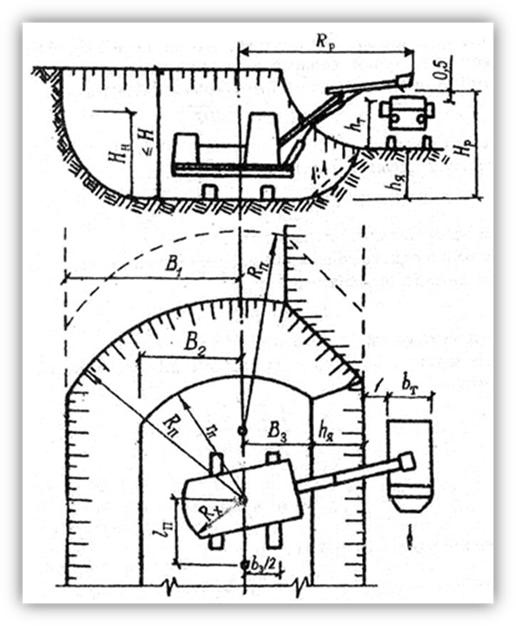
Рисунок 2.16 - Боковая двухъярусная проходка экскаватора прямая лопата:
Н - наибольшая высота копания, м;
Ня - высота напорного вала, м;
Нр - наибольшая высот разгрузки, м;
hя - высота яруса, м;
hт - высота от уровня стоянки транспортного средства до верха его бортов, м;
Рп - практический радиус копания на уровне напорного вала, м;
rп – практический радиус копания на уровне стоянки экскаватора, м;
Rр - радиус разгрузки при наибольшей высоте разгрузки, м;
Rх - радиус, описываемый хвостовой частью платформы;
В1 - расстояние от оси забоя до верхней бровки бокового откоса, м;
В2 и В3 - расстояния от оси забоя до нижних бровок соответственно левого и правого откосов, м;
lп - длина передвижки экскаватора, м;
вэ - ширина хода экскаватора, м;
вт - ширина хода транспортного средства, м
Высота напорного вала соответствует горизонтальному положению рукояти экскаватора на уровне седлового подшипника и при среднем положении стрелы может быть определена по эмпирической формуле:
![]() (2.9)
(2.9)
где Gэ - масса экскаватора, кг.
Практические радиусы копания составляют:
Rп = (0,8...0,85)R; (2.10)
rп = 0,9r, (2.11)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.