 (кг×м).
(кг×м).
Далее определяем постоянные двигателя:

![]() (Н×м/А).
(Н×м/А).
По приближенной формуле определяем индуктивность якоря Lяд:
 (Гн),
(Гн),
где b=0,25¸0,6 (нижнее значение принимается для компенсированных машин, верхнее – для некомпенсированных). Принимаем b=0,6, т.к. у двигателей серии МИ нет компенсационных обмоток.
Момент инерции на валу двигателя:
![]() (кг∙м2).
(кг∙м2).
Подставив численные значения найденных параметров в коэффициенты передаточной функции двигателя, получим:
 (об/мин×В),
(об/мин×В),
 (с),
(с),
 (с),
(с),
Генератор включен последовательно с двигателем, поэтому передаточная функция генератора с двигателем имеет вид:

где  – суммарная постоянная
времени цепи якоря генератора и двигателя, с;
– суммарная постоянная
времени цепи якоря генератора и двигателя, с;
 – электромеханическая постоянная
времени двигателя при работе от генератора, с.
– электромеханическая постоянная
времени двигателя при работе от генератора, с.
![]() (с),
(с),
![]() (с).
(с).
Передаточная функция генератора с двигателем:


1.1.3. Выбор и расчет тахогенератора
Тахогенераторами называются небольшие электрические машины, предназначенные для преобразования механического перемещения вращения вала в электрический сигнал ̶ выходное напряжение. Тахогенераторы в схемах автоматики используются для измерения скорости вращения.
Тахогенератор выбираем таким образом, чтобы при заданной скорости вращения вала двигателя находиться на линейном участке его выходной характеристики. Характеристики тахогенератора ТГ-4 приведены таблице 3.
Таблица 3 – Характеристики тахогенератора ТГ-4
|
Напряжение возбуждения, В |
Частота сети, ГЦ |
Крутизна генераторной ЭДС, мВ/об/мин |
Остаточное напряжением (не более), мВ |
Полное выходное сопротивление генераторной обмотки |
|
110 |
400 |
10 |
- |
- |
Окончание таблицы 3
|
Ток в обмотке возбуждения, А |
Мощность возбуждения, Вт |
Номинатльная скорость вращения, об/мин |
Статический момент трения (не более),кг×м |
Вес, кг |
|
0,3 |
12 |
6000 |
15×10-5 |
1,5 |
Передаточная функция тахогенератора:
 (В/об/мин).
(В/об/мин).
1.2 Нахождение передаточных функций разомкнутой и замкнутой системы
Структурная схема системы представлена на рисунке 2.

Рисунок 2 — Структурная схема АСР
Со структурной схемы видно, что элементы соединены последовательно, поэтому передаточная функция разомкнутой системы будет состоять из перемноженных передаточных функций всех элементов:

где Кид – коэффициент передачи исполнительного двигателя, определяемый из условий устойчивости.
Тогда замкнутую передаточную функцию системы найдем следующим образом:

1.3 Анализ устойчивости АСР
Выпишем характеристическое уравнение (знаменатель передаточной функции замкнутой системы) и исследуем систему на устойчивость. Устойчивость АСР определим по критерию Гурвица.
![]()
Отсюда следует, что коэффициенты равны:
а0 = 1,443∙10–3; а1 = 0,074; а2 = 0,5983; а3 = 1; а4 = 0,0587∙Кид.
Определитель Гурвица для системы четвертого порядка будет иметь вид:
Определим коэффициент передачи исполнительного двигателя Кид. Приравняем определитель к нулю, решим это уравнение, найдем Кид.
Для определения коэффициента передачи исполнительного двигателя приравняем определитель к нулю и решим это уравнение относительно Кид:
![]()
![]()
![]()
Этот же коэффициент является и критическим коэффициентом Ккр.
Для удовлетворительного качества процесса регулирования выбираем Кид с 60% запасом устойчивости, т.е.:
![]()
![]()
![]()
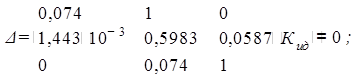
Проверим правильность нахождения коэффициента, решив главный определитель Гурвица и его диагональные миноры с новыми параметрами. Итак, для системы четвертого порядка получаем:

![]()

Так как главный определитель Гурвица и все его диагональные миноры больше нуля, то система устойчива.
Окончательно передаточные функции разомкнутой и замкнутой системы выглядит следующим образом:


1.4 Построение переходного процесса по вещественной частотной характеристике замкнутой системы
Для построения вещественной частотной характеристики подставляем в передаточную функцию замкнутой системы p = jw:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.