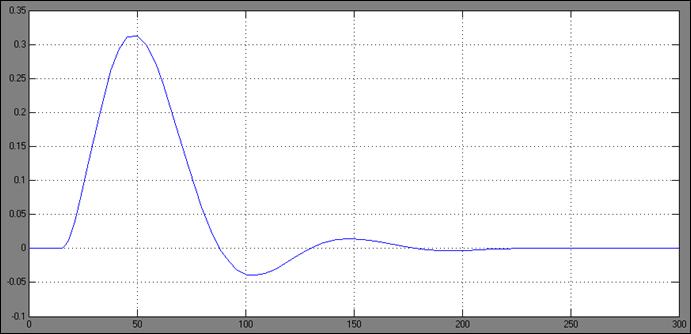
Рисунок 4.8 – Переходной процесс при оптимальных настройках регулятора
Для получения значений настроек регулятора в командной строке MATLAB 6.5 вводится команда:
>> p, i, d.
В результате в рабочее окно будут выведены оптимизированные значения настроек регулятора:
p = 0,57;
i = 0,016;
d = 8,17;
В результате оптимизации были получены следующие настройки ПИД-регулятора:
- коэффициент усиления регулятора Kр = p = 0,57 %ХРО/ ºС;
- время изодрома Tи = p/i = 35,625 с;
- время предварения Tд = d/p = 14,3 с.
Окончательно передаточная функция регулятора будет иметь вид:
 .
.4.4 Определение устойчивости АСР
Проверим рассчитанную АСР на устойчивость с помощью п/п MATLAB 6.5 и пакета Control System Toolbox, который является одним из основных инструментариев разработчика систем управления в среде MATLAB 6.5. Это сборник алгоритмов MATLAB для моделирования, анализа и проектирования СУ. В пакете используются как и традиционные методы ТАУ с использованием передаточных функций, так и современные методы с использованием пространства состояния.
Основные свойства пакета Control System:
формы представления
· непрерывные и дискретные СУ.
· форматы моделей: передаточные функции (ПФ), пространство состояний (ПС), нули-полюса (НП).
· построение линейных моделей СУ.
· преобразование моделей в различные форматы: ПФ, НП, ПС.
анализ
· полный набор средств для анализа одно- (SISO) и многомерных (MIMO) систем.
· временные характеристики: переходная и импульсная переходная характеристики, реакция системы на произвольное воздействие.
· частотные характеристики: диаграммы Боде (АЧХ, ФЧХ), Найквиста и Никольса (АФХ) и др..
проектирование
· расчет параметров обратной связи.
· проектирование линейно-квадратичных регуляторов (LQR).
· характеристики моделей: управляемость, наблюдаемость, понижение порядка модели.
· поддержка систем с запаздыванием.
Пакет часто используется совместно с другими пакетами MATLAB для проектирования более сложных СУ.
Итак, в рабочем окне программы вводим специальные команды, задаем передаточную функцию объекта управления, ПИД-регулятора и охватываем объект обратной связью по аналогии с рисунком 4.6. С помощью встроенных средств строим годограф Найквиста (рисунок 4.9). Листинг команд, использованных при работе с MATLAB, представлен ниже:
>> w1=tf(3.7375,[39.597 1],'inputdelay',28.328)
Transfer function:
3.737
exp(-28.3*s) * ----------
39.6 s + 1
>> w2=pade(w1,1)
Transfer function:
-3.737 s + 0.2639
---------------------------
39.6 s^2 + 3.796 s + 0.0706
>> pid=tf([290.38 20.3 0.57],[35.625 0])
Transfer function:
290.4 s^2 + 20.3 s + 0.57
-------------------------
35.63 s
>> s=feedback(w2,pid)
Transfer function:
-133.1 s^2 + 9.4 s
--------------------------------------
325.3 s^3 + 136 s^2 + 5.741 s + 0.1504
>> nyquist(s)
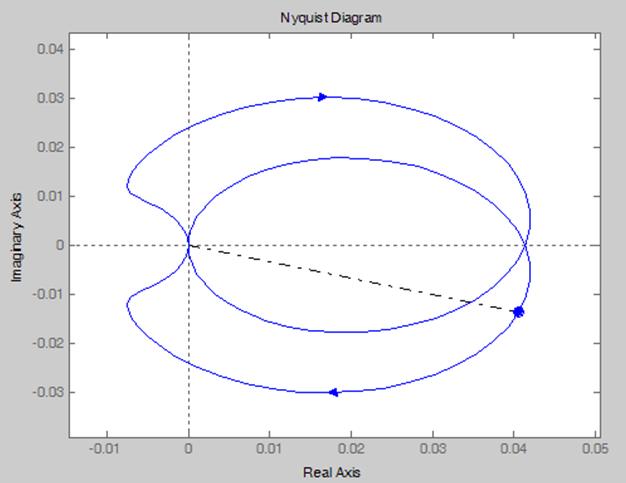
Рисунок 4.9 – Годограф Найквиста
Как видно из рисунка, годограф не охватывает точку с координатой (-1; j0), значит система устойчива. АСР также обладает достаточным запасом устойчивости по амплитуде и по фазе.
Для того, чтобы убедиться в правильности нахождения настроек регулятора, изменим настройки ПИД – регулятора на 20 % в большую сторону (КП = 0,684 ХРО/ºC; ТИ =42,75 с; ТД = 17,16 с), и в меньшую сторону (КП = 0,456 %ХРО/ ºC; ТИ= 28,5 с; ТД = 11,44 с).
 1 - переходная характеристика с оптимальными параметрами; 2 - переходная
характеристика с параметрами объекта увеличенными на 20%; 3 - переходная
характеристика с параметрами объекта уменьшенными на 20%.
1 - переходная характеристика с оптимальными параметрами; 2 - переходная
характеристика с параметрами объекта увеличенными на 20%; 3 - переходная
характеристика с параметрами объекта уменьшенными на 20%.
Рисунок 4.10 – Проверка системы на грубость
Из рисунка 4.10 видно, что при изменении параметров регулятора качество процесса регулирования ухудшается, но при этом система остается устойчивой следовательно найденные параметры регулятора оптимальны.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.