2) Исходное ограничение, записанное в виде неравенства типа £ или ³, можно представить в виде равенства, прибавляя или вычитая дополнительную неотрицательную переменную к левой части ограничения. Число таких переменных равно числу неравенств в системе ограничений. (Чтобы дополнительные переменные не оказывали влияние на значение целевой функции, они должны входить в целевую функцию с нулевыми коэффициентами.)
3) Если переменная xi не имеет ограничений в знаке, то она заменяется разностью двух неотрицательных переменных:
xi = xi¢ – xi¢¢, xi¢ ³ 0, xi¢¢ ³ 0.
|
8x1 + 7x2 + 6x3 ® max 2x1 + 3x2 + 4x3 £ 150 x1 + 4x2 + 5x3 £ 180 3x1 + 4x2 + 2x3 ³ 100 x1 ³ 0, x2 ³ 0. |
– 8x1 – 7x2 – 6x3 ® min x3 = x4 – x5, x4, x5 ³ 0. 2x1 + 3x2 + 4(x4 – x5) + x6 = 150 x1 + 4x2 + 5(x4 – x5) + x7 = 180 3x1 + 4x2 + 2(x4 – x5) – x8 = 100 |
Таким образом, преобразование задачи в каноническую форму приводит к увеличению размерности задачи (количества переменных).
Графический способ решения задач линейного программирования
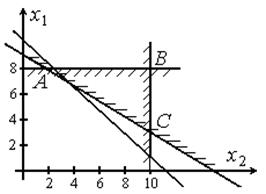
Постановка задачи: минимизировать G = 40x1 + 36x2 при ограничениях
|
|
x1 < 8, x2 < 10, 5x1 + 3x2 > 45, x1 > 0, x2 > 0. x1 > 9 – 0,6 x2 G = 40x1 + 36x2 = 400 x1 = 10 – 0,9 x2 G(A) = 40×8 + 36×5/3 = 320 + 60 = 380 G(B) = 40×8 + 36×10 = 320 + 360 = 680 G(C) = 40×3 + 36×10 = 120 + 360 = 480 |
Геометрически сочетание всех неравенств дает многоугольную область, называемую допустимым множеством (областью) решений. Она получается в результате пересечения всех полуплоскостей, отвечающих неравенствам системы. Оптимальное решение, т.е. лучшее допустимое решение, всегда находится на границе допустимой области изменения переменных: либо в одной из ее вершин, либо на грани, либо при наличии незамкнутой области имеет бесконечно большое значение.
Из линейности целевой функции следует, что ее градиент
– вектор, указывающий направление возрастания функции и перпендикулярный ей,  постоянен в любой точке, а линии уровня
функции G параллельны друг другу.
постоянен в любой точке, а линии уровня
функции G параллельны друг другу.
Симплекс-метод решения задач линейного программирования
Использование графического способа удобно только при решении задач ЛП с двумя переменными. При большем числе переменных необходимо применение алгебраического аппарата. Симплекс-метод является общим методом решения задач ЛП, с помощью которого можно получить экономическую интерпретацию полученного решения и провести анализ модели на чувствительность. Решение находится с помощью итеративной процедуры.
Классическим методом решения систем линейных уравнений является метод Гаусса-Жордана. Он заключается в сведении системы m уравнений с n неизвестными к каноническому виду при помощи элементарных операций над
|
строками: |
xi ³ 0, i = 1, 2, …, n. |
Переменные х1, х2, …, хm, входящие с единичными коэффициентами, называются базисными или зависимыми. Остальные переменные – небазисные.
Базисным решением системы в каноническом виде называется решение, полученное при нулевых значениях небазисных переменных (х1 = b1,…, хm = bm, хm+1 = … = хn =0).
Если b1 ³ 0, …, bm ³ 0, то полученное решение называется допустимым базисным решением.
Основная идея симплекс-метода заключается в упорядоченном переборе базисных допустимых решений, при котором осуществляется переход от текущей опорной точки (базисного допустимого решения) только к тем опорным точкам, в которых значение целевой функции меньше, чем в текущей.
Алгоритм симплекс-метода включает следующие основные шаги:
- сведение задачи ЛП к каноническому виду;
- выбор допустимого базисного решения;
- выражение ограничений и целевой функции через небазисные переменные (переменные, равные нулю в точке решения);
- если коэффициенты целевой функции (при небазисных переменных) отрицательны (задача нахождения минимума), необходимо перейти к смежному допустимому базисному решению с меньшим значением целевой функции, и возвратиться к предыдущему пункту; если коэффициенты целевой функции положительны, точка оптимума найдена.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.