


















|
|
|
|
|
|
|
КАФЕДРА ПРИКЛАДНОЙ МЕХАНИКИ
к расчётно-графической работе по дисциплине “Детали машин”
на тему: Привод ленточного транспортера
Автор проекта
Специальность 210200, компьютерное проектирование
Обозначение проекта КП – 2068956 – 40 – 01 – 02
Группа
Руководитель проекта Чешев В.Ф.
Проект защищен Оценка
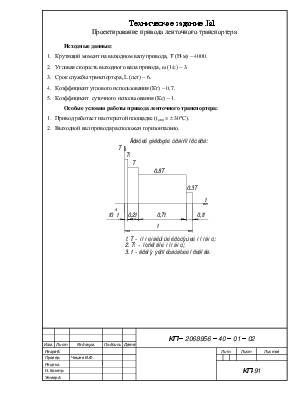
Проектирование привода ленточного транспортера
Исходные данные:
1. Крутящий момент на выходном валу привода, Т (Н×м) - 4000.
2. Угловая скорость выходного вала привода, w (1/с) - 3.
3. Срок службы транспортера, L (лет) - 6.
4. Коэффициент углового использования (Кг) - 0,7.
5. Коэффициент суточного использования (Кс) - 1.
1. Привод работает на открытой площадке (tокр = ± 30°С).
2. Выходной вал привода расположен горизонтально.
 |
Введение
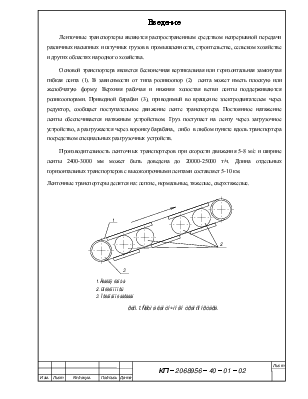
Ленточные транспортеры являются распространенным средством непрерывной передачи различных насыпных и штучных грузов в промышленности, строительстве, сельском хозяйстве и других областях народного хозяйства.
Основой транспортера является бесконечная вертикальная или горизонтальная замкнутая гибкая лента (1). В зависимости от типа роликоопор (2) лента может иметь плоскую или желобчатую форму. Верхняя рабочая и нижняя холостая ветви ленты поддерживаются роликоопорами. Приводной барабан (3), приводимый во вращение электродвигателем через редуктор, сообщает поступательное движение ленте транспортера. Постоянное натяжение ленты обеспечивается натяжным устройством. Груз поступает на ленту через загрузочное устройство, а разгружается через воронку барабана, либо в любом пункте вдоль транспортера посредством специальных разгрузочных устройств.
Производительность ленточных транспортеров при скорости движения 5-8 м/с и ширине ленты 2400-3000 мм может быть доведена до 20000-25000 т/ч. Длина отдельных горизонтальных транспортеров с высокопрочными лентами составляет 5-10 км.
Ленточные транспортеры делятся на: легкие, нормальные, тяжелые, сверхтяжелые.
|
1. Разработка кинематических схем
1.1
Нахождение частоты
вращения исполнительного органа nвых 
где w = 3![]() – угловая скорость выходного
вала привода
– угловая скорость выходного
вала привода
1.2 Разработка первой кинематической схемы привода
При выбранной частоте вращения двигателя nдв1=1500 об/мин, рассчитаем общее передаточное отношение привода представленного на рис.2
Для схемы 1 (рис.2) общее, расчетное передаточное отношение (uобщ1расч.) находится из произведения передаточных отношений ременной (uрем. = 2), червячной (uч. = 8) и цилиндрической прямозубой (uц.п. = 3,15) передач:
uобщ1расч = uрем.× uч.× uц.п. = 2 × 8 × 3,15 = 50,4
Рассчитаем скорость исполнительного органа для рассчитанного передаточного отношения:
nвых.расч1![]() = nдв1/ uобщ1расч.= 1500/50,4 =29,762 об/мин
= nдв1/ uобщ1расч.= 1500/50,4 =29,762 об/мин
Найдем ошибку по скорости исполнительного органа:
 ;
;
![]() ,
, ![]() условие выполняется.
условие выполняется.
Рассчитаем КПД привода по формуле:
![]()
где ![]() - КПД открытой, червячной, цилиндрической
прямозубой передач, и трех пар подшипников соответственно.
- КПД открытой, червячной, цилиндрической
прямозубой передач, и трех пар подшипников соответственно.
Требуемую мощность электродвигателя рассчитаем по формуле:
 ,
,
где T - крутящий момент на выходном валу привода;
w - угловая скорость выходного вала привода.
Выбираем двигатель серии 4А160M4,
при nдв1 = 1500 об/мин.
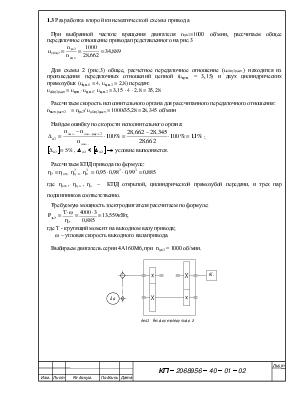
1.3 Разработка второй кинематической схемы привода
При выбранной частоте вращения двигателя nдв2=1000 об/мин, рассчитаем общее передаточное отношение привода представленного на рис.3
Для схемы 2 (рис.3) общее, расчетное передаточное отношение (uобщ2расч.) находится из произведения передаточных отношений цепной (uцеп. = 3,15) и двух цилиндрических прямозубых (uц.п.1 = 4, uц.п.2 = 2,8) передач:
uобщ2расч = uцеп.× uц.п.1× uц.п.2 = 3,15 × 4 × 2,8 = 35,28
Рассчитаем скорость исполнительного органа для рассчитанного передаточного отношения:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.