













Задание к работе и исходные данные.
Произвести анализ предложенной системы, определить динамические и статические показатели качества системы. Выполнить моделирование системы на ЭВМ. Затем разработать корректирующее звено и проверить работу скорректированной системы. При этом система должна остаться того же типа, что и исходная (статическая или астатическая). Требования к системе:
1. Статическая ошибка не должна превышать 5%
2. Длительность переходного процесса должна быть на порядок меньше, чем в исходной системе.
3. Перерегулирование при отработке единичного ступенчатого сигнала не должно превышать 5% от установившегося значения управляемой величины.
Уравнения системы:
y1 = y
x1 = (y2 + y4) - z
x2 = x4 = y3
x3 = x - y
Значение коэффициентов k, k0, T и τ приведены в таблице 1.
Таблица 1
|
№ звена |
k |
k0 |
T |
τ |
|
1 |
0,9 |
1 |
1,2 |
1 |
|
2 |
0,6 |
0 |
0 |
0,5 |
|
3 |
1 |
- |
0,5 |
- |
|
4 |
0,5 |
- |
0 |
0 |
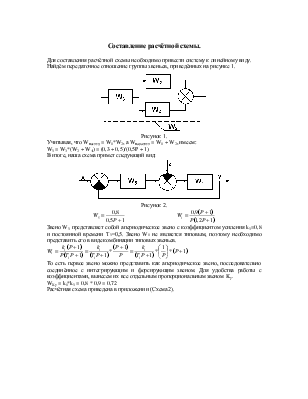
Составление принципиальной схемы.
Конечный выходной сигнал y получается на выходе первого звена. Входной сигнал первого звена получается путём суммирования выходных сигналов со второго и четвёртого звеньев с последующим вычитанием из них сигнала z. Таким образом, сигналы со второго и четвёртого звеньев подаются на сумматор с положительными знаками. С выхода сумматора сигнал идёт на вход другого сумматора, на другой вход которого с отрицательным знаком подаётся сигнал z. С выхода этого сумматора сигнал идёт на вход первого звена. Входные сигналы второго и четвёртого звеньев равны между собой и равны выходному значению третьего звена, следовательно, второе и четвёртое звено подключены параллельно. Входной сигнал третьего звена равен разности главного входного сигнала и главного выходного сигнала. Сигнал x поступает на сумматор с положительным знаком, а сигнал y - с отрицательным. Результат суммирования поступает в третье звено, с выхода которого сигнал подаётся на второе и четвёртое звено. Базовая схема приведена в приложении (Схема 1).
Расчёт передаточных функций.
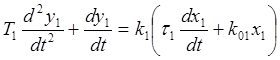
Для первого элемента имеем:
Подставим в это уравнение коэффициенты, равные нулю или единице. В результате получим:
Произведём преобразование 
T1P2y1 + Py1 = k1(Px1 + x1)
Py1(T1P + 1) = k1x1(P + 1)
Выразим из этого уравнения y1:
Передаточная функция первого звена равна
т.е. сложную передаточную функцию первого звена можно разложить на три простые передаточные функции типовых звеньев.
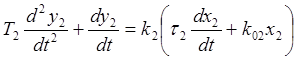
Для второго элемента:
Подставим в это уравнение коэффициенты, равные нулю или единице. В результате получим:
Произведём преобразование
Py2 = k2τ2Px2, откуда y2 = k2τ2x2.
Второе звено является пропорциональным с коэффициентом усиления W2 = k2τ2.
Для третьего элемента:
Подставим в это уравнение
коэффициенты, равные нулю или единице и произведём преобразование . В результате получим:
Т3Py3 + y3 = x3, откуда y3 = x3/(T3P+1)
Третье звено является апериодическим с передаточной функцией W3 = 1/(T3P+1)
Для четвёртого элемента:
Подставим в это уравнение коэффициенты, равные нулю или единице. В результате получим:
y4 = k4x4
Четвёртое звено является пропорциональным с коэффициентом усиления W4 = k4.
Итог:
W2 = k2τ2
W3 = 1/(T3P+1)
W4 = k4
Составление расчётной схемы.
Для составления расчётной схемы необходимо привести систему к линейному виду.
Найдём передаточное отношение группы звеньев, приведённых на рисунке 1.
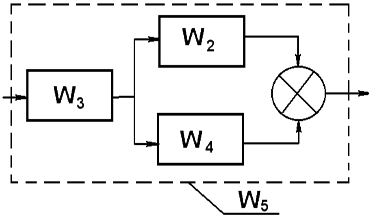
Рисунок 1.
Учитывая, что Wпослед = W1*W2, а Wпараллел = W1 + W2, имеем:
W5 = W3*(W2 + W4) = (0,3 + 0,5)/(0,5P + 1)
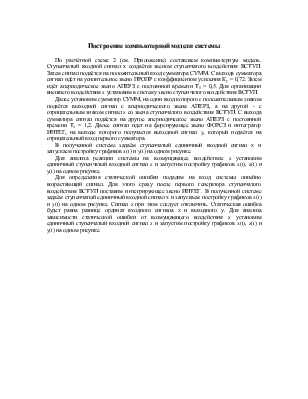
В итоге, наша схема примет следующий вид:
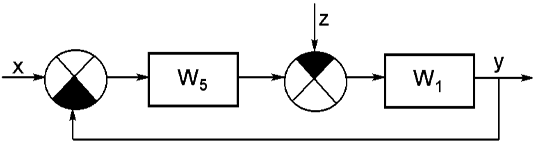
Рисунок 2.
Звено W5 представляет собой апериодическое звено с коэффициентом усиления k5=0,8 и постоянной времени T5=0,5. Звено W1 не является типовым, поэтому необходимо представить его в виде комбинации типовых звеньев.

То есть первое звено можно представить как апериодическое звено, последовательно соединённое с интегрирующим и форсирующим звеном. Для удобства работы с коэффициентами, вынесем их все отдельным пропорциональным звеном Kу.
WKу = k1*k5 = 0,8 * 0,9 = 0,72
Расчётная схема приведена в приложении (Схема 2).
Построение компьютерной модели системы
По расчётной схеме 2 (см. Приложение) составляем компьютерную модель. Ступенчатый входной сигнал х создаётся звеном ступенчатого воздействия ВСТУП. Затем сигнал подаётся на положительный вход сумматора СУММ. С выхода сумматора сигнал идёт на усилительное звено ПРОПР с коэффициентом усиления Ку = 0,72. Затем идёт апериодическое звено АПЕРЗ с постоянной времени Т5 = 0,5. Для организации внешнего воздействия z установим в систему звено ступенчатого воздействия ВСТУП.
Далее установим сумматор СУММ, на один вход которого с положительным знаком подаётся выходной сигнал с апериодического звена АПЕРЗ, а на другой - с отрицательным знаком сигнал z со звена ступенчатого воздействия ВСТУП. С выхода сумматора сигнал подаётся на другое апериодическое звено АПЕРЗ с постоянной времени Т6 = 1,2. Далее сигнал идет на форсирующее звено ФОРСЗ и интегратор ИНТЕГ, на выходе которого получается выходной сигнал y, который подаётся на отрицательный вход первого сумматора.
В полученной системе задаём ступенчатый единичный входной сигнал х и запускаем постройку графиков x(t) и y(t) на одном рисунке.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.