3. Статичний компьютерний розрахунок поперечної рами з фермою.
В сучасному проектуванні для розрахунку конструкцій широко застосовується метод кінцевих елементів. В цих методичних вказівках передбачається виконання статичного розрахунку рами з фермою за методом кінцевих елементів у деформаціях, закладеним в основу компьютерної програми LIRA, автором якої є Київський науково-дослідний інститут автоматизованих систем в будівництві (НДІАСБ).
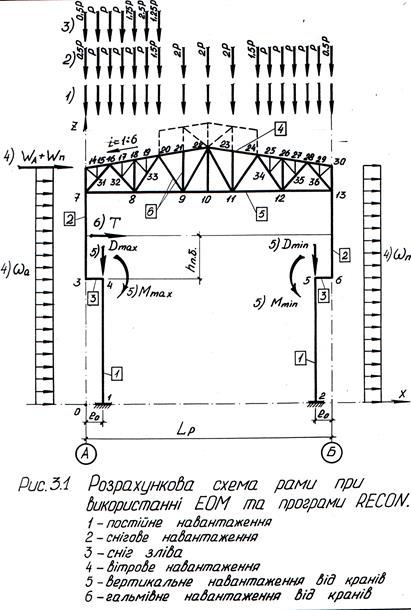
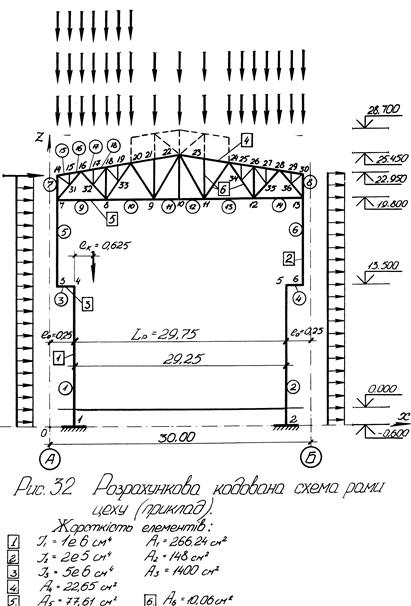
3.1. Кодування розрахункової схеми рами для уведення в ЕОМ .
Розрахункова схема рами (рис.2.5) - це геометрична схема конструкції, на якій позначені всі необхідні розміри, перерізи й жорст-кості елементів, умови закріплення й спирання, діючі навантаження. Крім того, на схемі повинні бути пронумеровані вузли (позначаються цифрами), кінцеві елементи – стержні (позначаються цифрами в кружечках), типи жорсткостей елементів (позначаються цифрами в прямокутничках). Нумерацію вузлів конструкції слід проводити, починаючи з лівого нижнього кута, тобто з початку загальної (глобальної) системи координат, з нарощуванням порядку нумерації зліва направо та знизу догори. Такий порядок забезпечує принцип, закладений програмою: стержні конструкції повинні мати початок у вузлі з меншим номером в порівнянні з номером кінця стержня.
На розрахунковій схемі показують напрямок осей загальної (глобальної) та місцевої (локальної) систем координат. Ці системи координат слід приймати обов’язково правими прямокутними. Для загальної системи координат вісь OZ та локальної системи O1Z1 ске-ровані до споглядача в правій системі координат. Загальна система координат описує геометрію всієї системи, фіксуючи місцезнаходження кожного вузла двома координатами - xта z. Місцева система координат o1x1y1z1 вибирається таким чином, щоб одна з осей, а саме o1x1 проходила вздовж осі стержня в напрямку від його початку до кінця, а дві інші осі співпадали з головними осями інерції перерізу стержня o1y1 та o1z1 .
Інформація, що описує місцезнаходження вузлів, величини силових факторів, що діють на вузли та елементи, може наводитися як в загальній системі координат, так і в місцевій. Це ж відноситься й до видачі результатів розрахунку.
Для загальної системи координат прийняте таке правило знаків для силових факторів. Сили зі знаком “плюс” співпадають за напрямком з осями, вздовж яких вони діють. Знак момента визначають за правилом “буравчика” (для спостерігача, який розмістився в початку координат, при погляді вздовж додатного напрямку осі додатний момент діє за годинниковою стрілкою).
На розрахункову схему наносять розміри, які б полегшували ви-значення координат вузлів та ексцентриситетів, а також величини жорсткостей та силових факторів.
3.2. Вихідні дані для компьютерного розрахунку рами.
Написання вихідних даних слід виконувати акуратно, пастою, не допускаючи двозначного їх тлумачення. З цією ціллю цифру 0 пере-креслюють косою лінією ( 0 ), щоб відрізнити її від літери о.
Бажано вихідні дані розміщувати на папері в клітинку, відводячи для кожної цифри, літери, знака ( крапка, кома, апостроф та т.ін.) одну клітинку.
Вихідні дані заповнюються в одиницях виміру, вказаних над кожною колонкою на екрані компьютера.
3.3. Результати компьютерного розрахунку.
Нижче наводиться розпечатка результатів розрахунку однопрогінної одноповерхової поперечної рами промислового будинку з мостовими кранами на персональному компьютері за програмою LIRA. Спочатку наводяться вихідні дані у формі таблиць, які були уведені з клавіатури. Розмірність координат вузлів - в м, модуля пружності - в кН/м2., геометричних характеристик перерізів - в см2 та в см4 , навантажень - в кН, кНм такН/м .
В результаті компьютерного розрахунку можна вивести на принтер розпечатки - переміщення вузлів ( лінійні - в мм , кутові - в рад.10-3 ) , внутрішні зусилля в стержнях колон ( N в кН, M в кНм та Q в кН)та ферм ( N вкН) від кожного завантаження окремо, а також розрахункові сполучення зусиль (РСУ).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.