Поскольку ошибка аппроксимации Δ не превышает 5%, передаточная характеристика подобрана верно и в дальнейших расчетах будем использовать именно ее.
2.4 Определение типа регулятора по номограмме
Для
определения типа регулятора по номограмме необходимо знать отношения: ![]() и
и ![]() ,
,
где t*=160 сек – время переходного процесса;
![]() =5
сек – величина запаздывания объекта;
=5
сек – величина запаздывания объекта;
T = 10 сек – минимальная постоянная времени объекта.
![]() ;
;
![]()
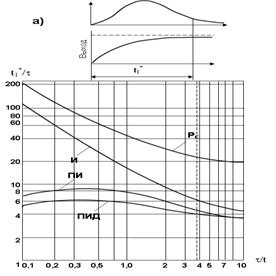
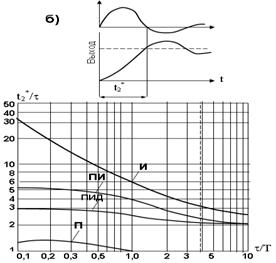
Рисунок 2.4.1 - Номограммы для определения закона регулирования:
а) переходная характеристика без перерегулирования; б) переходная характеристика с 20%-ным перегулированием.
Поскольку исследуемая (исходная) переходная характеристика без перерегулирования, то выбираем рисунок 2.4.1 (а). На пересечении линий значений 32 по оси ординат и от 0 до 0,5 по оси абсцисс получаем точку между кривыми И и ПИ регуляторов. Останавливаем свой выбор на ПИ-регуляторе, как более универсальном и практически применяемом.
При ПИ-законе регулирования перемещение рабочего органа пропорционально сумме отклонения и интеграла от отклонения регулируемой величины:
Иначе: скорость регулирования пропорциональна отклонению регулируемой величины и ее производной.
![]()
Или в операторной форме:
![]() ,
,
где С0=Кр/Ти, С1=Кр
С0, C1 — настроечные параметры ПИ-регулятора, которые далее необходимо определить.
2.5 Расчет настроечных параметров регулятора
2.5.1 Табличный метод расчета
Задача настройки заключается в том, чтобы в заданной системе регулирования выбрать и установить параметры регулятора, обеспечивающие оптимальный процесс регулирования.
Исходными данными для данного расчёта является экспериментальная переходная характеристика объекта и принятый тип регулятора. Расчет проводим в три этапа:
1) находим отношение τ/T, где τ - полное запаздывание объекта, Т- максимальная (по модулю) постоянная времени объекта:
τ/T=5/280=0,02;
2) по таблице для заданного типа регулятора и полученного отношения τ/Т находим расчетные выражения для определения параметров настройки регулятора:
для ПИ-регулятора и полученного отношения τ /Т=0÷0,2 определяем параметры настройки регулятора:
τ / Т = 0 ÷ 0,2
σ = 1,1 * Коб * τ / T = 1,1 * 16,4 * 5 / 280 = 0,324;
Ти = 3,3 * τ = 3,3 * 5 = 16,5;
 ;
;
δ = 1 / Кр;
Кр = 1 / δ = С1;
С1 = Кр=1 /0,324 = 3,085;
С0 = Кр / Ти =3,085/16,5=0,187;
Wпи(p) = – (0,187 + 3,085p) / p - передаточная функция ПИ-регулятора.
3) По найденной передаточной функции регулятора построим переходную характеристику замкнутого контура "регулятор-объект регулирования" с помощью программы VisSim 3.0, см. рисунок 2.5.1:
Рисунок 2.5.1.1 - модель одноконтурной АСР с объектом, заданным передаточной функцией и ПИ-регулятором с настройками С0 = 0,187 и С1 = 3,085.
Для моделирования объекта управления были использованы блоки передаточной функции (transferFunction), запаздывания (timeDelay) и константы (const).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.