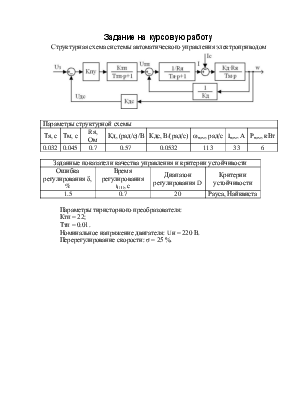
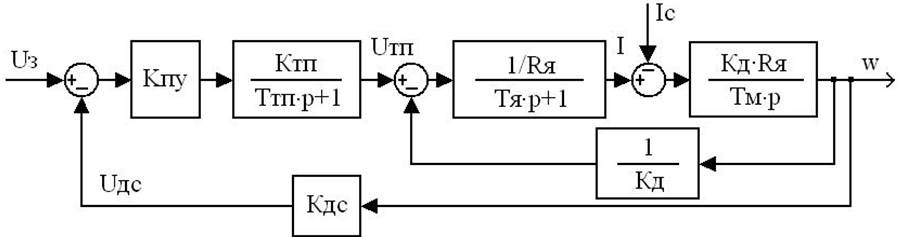
Структурная схема системы автоматического управления электроприводом
|
Параметры структурной схемы |
|||||||
|
Тя, с |
Тм, с |
Rя, Ом |
Кд, (рад/с)/В |
Кдс, В/(рад/с) |
ωном, рад/с |
Iном, А |
Рном, кВт |
|
0.032 |
0.045 |
0.7 |
0.57 |
0.0532 |
113 |
33 |
6 |
|
Заданные показатели качества управления и критерии устойчивости |
|||
|
Ошибка регулирования δ, % |
Время регулирования tПП, с |
Диапазон регулирования D |
Критерии |
|
1.5 |
0.7 |
20 |
Рауса, Найквиста |
Параметры тиристорного преобразователя:
Ктп = 22;
Ттп = 0.01.
Номинальное напряжение двигателя: Uн = 220 В.
Перерегулирование скорости: σ = 25 %.
Для дальнейших преобразований найдем передаточную функцию объекта управления, которая состоит из произведения передаточной функции тиристорного преобразователя и двигателя .
Система в одноконтурном виде:
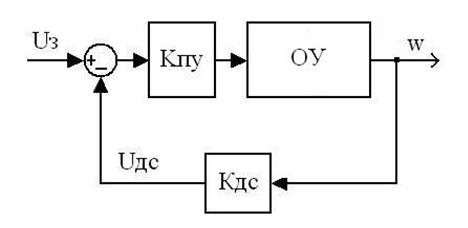
Рисунок 1.1 – Одноконтурная САУ
(ОУ – объект управления, с передаточной функцией Woy(р))
Найдем передаточную функцию САУ в разомкнутом состоянии по управляющему воздействию:
Для определения передаточной функции разомкнутой системы по возмущающему воздействию необходимо произвести некоторые преобразования исходной структурной схемы (преобразованная структурная схема представлена на рисунке 1.2):
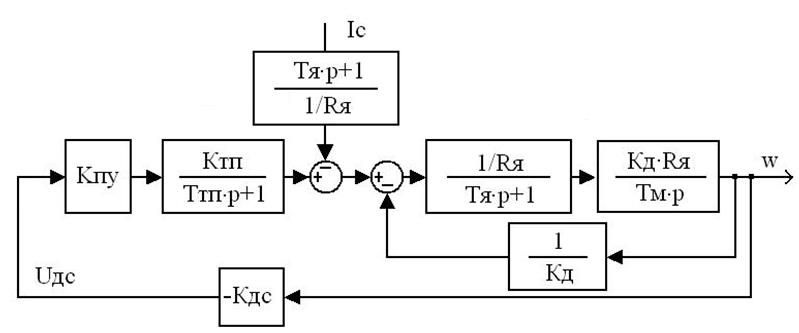
Рисунок 1.2 – Преобразованная структурная схема
(для нахождения передаточных функций по возмущению)
По полученной структурной схеме определяем передаточную функцию разомкнутой системы по возмущающему воздействию:
Найдём ПФ замкнутой системы по управлению:
Найдём ПФ замкнутой системы по возмущению:
Найдём передаточную функцию по ошибке от управляющего воздействия:
Найдём передаточную функцию по ошибке от возмущающего воздействия:
Запишем найденные передаточные функции с подставленными значениями коэффициентов усиления и постоянных времени:
1) Передаточная функция по управляющему воздействию в разомкнутом состоянии:

2) Передаточная функция по возмущающему воздействию в разомкнутом состоянии:

3) Передаточная функция по управляющему воздействию в замкнутом состоянии:
4) Передаточная функция по возмущающему воздействию в замкнутом состоянии:
5) Передаточная функция по ошибке от управляющего воздействия:
6) Передаточная функция по ошибке от возмущающего воздействия:
Из условия статической точности (δ = 1,5%) и заданного диапазона регулирования (D = ωmax/ ωmin= 20) определим требуемый коэффициент усиления разомкнутой системы.
![]()
![]()

![]()
Коэффициент передачи промежуточного усилителя:

Запишем все полученные передаточные функции подставив найденное значение Кпу:
1) Передаточная функция по управляющему воздействию в разомкнутом состоянии:

2) Передаточная функция по возмущающему воздействию в разомкнутом состоянии:

3) Передаточная функция по управляющему воздействию в замкнутом состоянии:
4) Передаточная функция по возмущающему воздействию в замкнутом состоянии:
5) Передаточная функция по ошибке от управляющего воздействия:

6) Передаточная функция по ошибке от возмущающего воздействия:

Найдем статическую ошибку от управляющего воздействия.


0.7<1.5 Условие статической точности удовлетворено.
По полученным ПФ САУ, можно сделать следующие выводы:
1. Знаменатели передаточных функций разомкнутых систем равны между собой и знаменатели передаточных функций замкнутых систем тоже равны, отсюда следует, что передаточные функции найдены верно.
2. Передаточные функции полученные для нашей САУ не имеют отрицательных членов в характеристических полиномах, поэтому сложно говорить об устойчивости САУ.
3.
САУ –статическая (отсутствует интегрирующие звенья в чистом виде т.е ![]() ).
).
Статическая
ошибка ![]() .
.
В качестве алгебраического критерия устойчивости используем критерий устойчивости Рауса. Для определения устойчивости по данному критерию необходимо найти характеристический полином замкнутой системы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.