1.
участок –Звено усиления, представляет собой горизонтальный участок Амплитуда:![]() дБ.
дБ.
2. участок – Звено второго порядка, наклон - 40 дБ/дек.
3. участок– Апериодическое звено, наклон - 60 дБ/дек .
Находим частоты сопряжения:
![]() рад/с.
рад/с.
![]() рад/с.
рад/с.
3.1.2 Желаемая ЛАХ.
Определяем желаемую частоту среза системы исходя из заданного перерегулирования скорости σ = 25% и времени переходного процесса tПП=0.7 с.
Исходя из заданного перерегулирования находим коэффициент k [Куропаткин, С. 223, рис 11.8 а] и Рмакс:
![]()
![]()
Определим частоту среза:
 рад/с.
рад/с.
По
значениям ![]() и
и ![]() определяем
по номограмме [Куропаткин, С. 223, рис 11.8 б] значения запаса по фазе и по
амплитуде:
определяем
по номограмме [Куропаткин, С. 223, рис 11.8 б] значения запаса по фазе и по
амплитуде:
![]() дБ –
ограничение среднечастотного участка слева
дБ –
ограничение среднечастотного участка слева
![]() дБ –
ограничение среднечастотного участка справа
дБ –
ограничение среднечастотного участка справа
![]()
В районе частоты среза наклон желаемой ЛАХ выбирается равным-20Дб/дек, что позволяет обеспечить необходимые запасы устойчивости по модулю и фазе.
На высоких частотах у желаемой ЛАХ наклон совпадает с наклоном нескорректированной ЛАХ (–60 дБ/дек).
На листе №1 изображены две желаемые ЛАХ.
1. Имеет 3 перегиба и значит 3 частоты сопряжения, которым соответствуют постоянные времени: Т1=0.01c; Т3=0.501c; Т4=1,501c.
Передаточная функция желаемой
ЛАХ: 
Выполним анализ переходного процесса замкнутой желаемой системы:
Wrazpos=tf([69.62 138.97],[0.0002253 0.04536 2.313 3.022 1])
Transfer function:
69.62 s + 139
-----------------------------------------------------
0.0002253 s^4 + 0.04536 s^3 + 2.313 s^2 + 3.022 s + 1
>> W=feedback(Wrazpos,1)
Transfer function:
69.62 s + 139
-------------------------------------------------------
0.0002253 s^4 + 0.04536 s^3 + 2.313 s^2 + 72.64 s + 140
>> step(W)
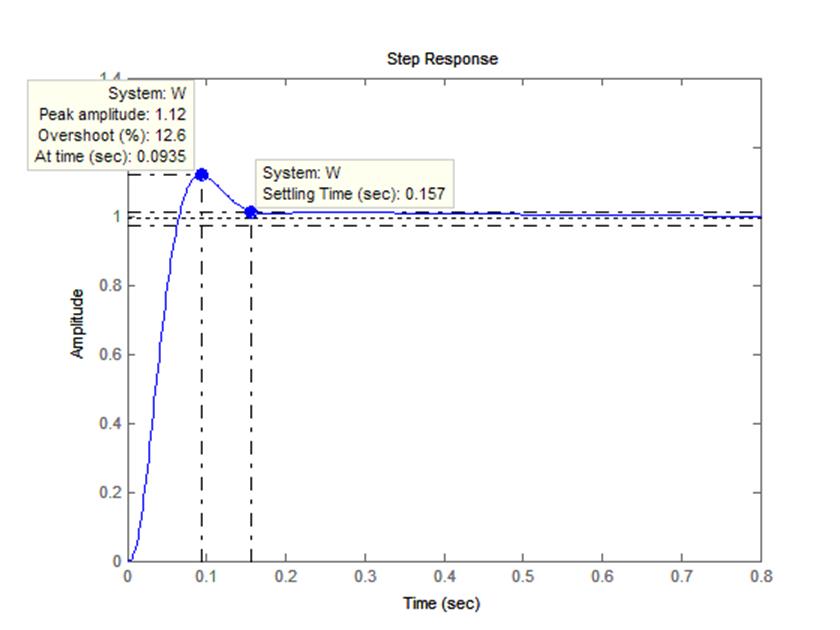
Время переходного процесса 0.15с;
Время первого согласования 0,04с;
Перерегулирование 12.6%
2. Имеет 2 перегиба и значит 2 частоты сопряжения, которым соответствуют постоянные времени: Т1=0.01c; Т’3=10c;.
Передаточная функция желаемой
ЛАХ: 
Выполним анализ переходного процесса замкнутой желаемой системы
Wrazpos2=tf(138.97,[0.1 10.1 1])
Transfer function:
139
--------------------
0.1 s^2 + 10.1 s + 1
>> W2=feedback(Wrazpos2,1)
Transfer function:
139
----------------------
0.1 s^2 + 10.1 s + 140
>> step(W2)
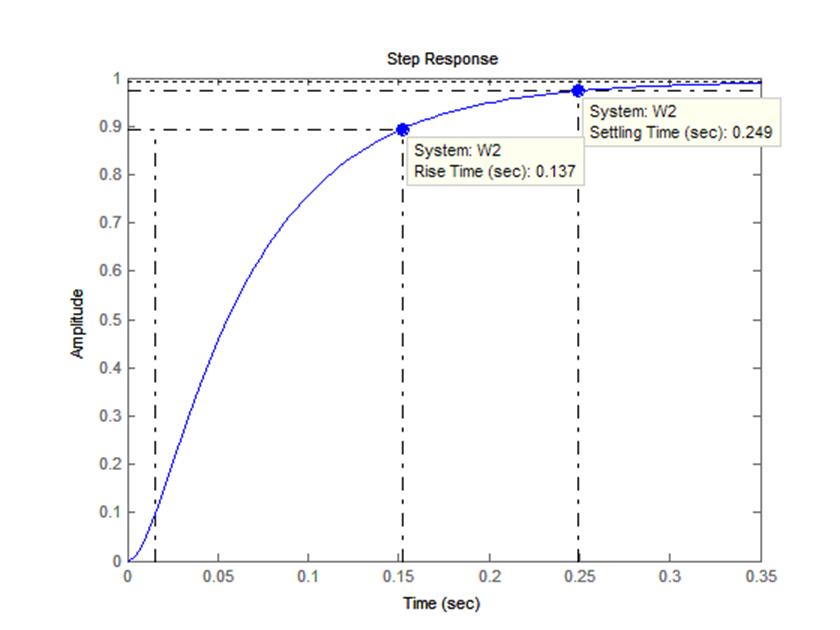
Время переходного процесса 0.249с;
Время первого согласования 0.137с;
Перерегулирование отсутствует.
Обе системы соответствуют заданному быстродействию. Так как в 1-ой системе присутствует перерегулирование, что не допустимо в ответственных приводах, выбираем желаемую ЛАХ с передаточной функцией:
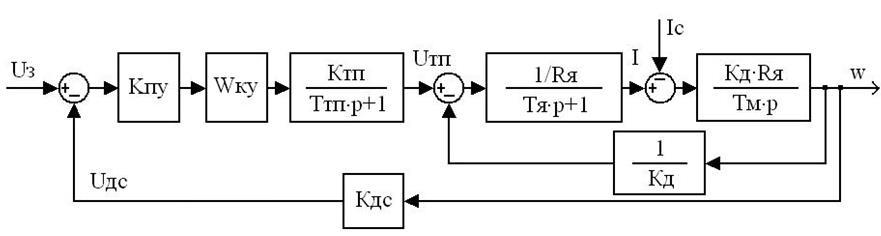
Рис 3.1 схема системы при последовательной коррекции.
Для
получения ЛАХ корректирующего устройства необходимо от ЛАХ желаемой системы
отнять ЛАХ нескорректированной системы. ![]()
Полученная ЛАХ (изображена на листе №1) имеет две частоты сопряжения и соответствующие им постоянные времени: Т1=0.01c; Т3=10c;.
Выбор схемы реализации по таблице типовых корректирующих устройств автоматического регулирования корректирующее устройство с аналогичной формой ЛАХ – затруднителен, так как данная форма не описана.
По построенной ЛАХ определяем передаточную функцию КУ
Передаточная функция корректирующего устройства определится:
![]()
![]()

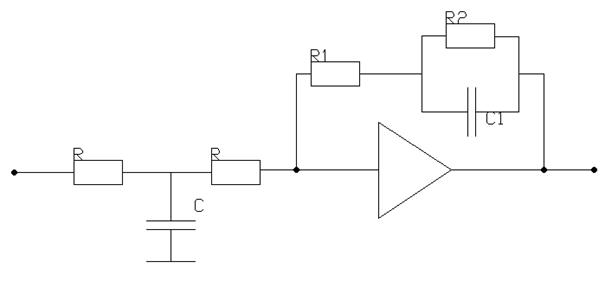
По полученной передаточной функции корректирующего устройства подберём схемную реализацию корректирующего устройства.
Где 
![]()
![]()
![]()
![]()
 =0.037
=0.037
В результате расчётов получаем параметры элементов цепи корректирующего устройства:
![]() кОм;
кОм; ![]() МОм;
МОм; ![]() кОм.
кОм.
![]() мкФ;
мкФ;
![]() мкФ;
мкФ;
При
параллельной коррекции ЛАХ корректирующего устройства находиться следующим
образом: ![]()
Lж(w) - ЛАХ скорректированной (желаемой) системы,
Lохв(w) - ЛАХ звеньев, охваченных корректирующей связью,
Lнс(w) - ЛАХ нескорректированной системы,
Lку(w) - ЛАХ корректирующего устройства.
Охватим корректирующей связью контур тока двигателя.
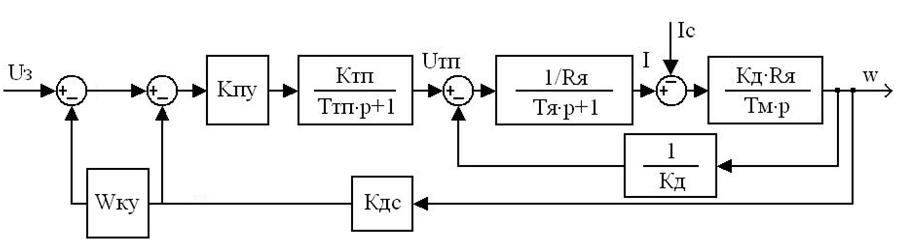
Рисунок 3.2. схема системы при параллельной коррекции.
Передаточная функция охваченной части системы совпадает с передаточной функцией разомкнутой нескорректированной системы по управляющему воздействию:

Желаемая ЛАХ, ЛАХ звеньев, охваченных корректирующей связью,
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.