|
В пункте 2.2.3 для нашего объекта САР была определена следующая передаточная функция:
 .
.
На основе данной передаточной функции
оценим ориентировочно характер действия регулятора по величине отношения
времени запаздывания ![]() к постоянной времени Т0
(Т0 – выбирается как коэффициент при p характеристического уравнения,
следовательно Т0 = 15,2733 с):
к постоянной времени Т0
(Т0 – выбирается как коэффициент при p характеристического уравнения,
следовательно Т0 = 15,2733 с):
![]() .
.
В промышленности наиболее часто
применяют регуляторы непрерывного действия (И-, П-, ПИ-, ПИД- регуляторы), так
как они могут практически всегда и достаточно качественно обеспечить типовой
переходной процесс: будь то апериодический, с 20%-ным перерегулированием или с
минимальной квадратичной площадью отклонения. Непрерывные регуляторы применяют
для объектов как обладающих, так и не обладающих самовыравниванием, для одно- и
многоемкостных объектов, имеющих малое и значительное запаздывание при плавно
меняющейся нагрузке. Условие применения этого типа регулятора -![]() .
.
Для заданной автоматической системы выберем регулятор, чтобы переходной процесс был апериодическим, при этом объект регулирования характеризуется следующими динамическими свойствами, полученными на основе передаточной функции:
· постоянная времени Т0 = 15,2733 с;
·
запаздывание в системе![]() ;
;
· передаточный коэффициент К0 = 0,0002 на 1% хода регулирующего органа;
· возмущение, действующее на объект регулирования, принять равным 10% хода регулирующего органа, т.е. хв = 10%;
К качеству процесса регулирования предъявляют следующие требования:
· Максимальное отклонение регулируемой величины (давления) не должно превышать 4 кПа.
· Остаточное отклонение регулируемой величины (давления) не должно превышать 1 кПа.
· Максимальное время регулирования tр.доп. = 60 с;
Для выбора регулятора, воспользуемся номограммой.
Проверяем максимальное отклонение:
![]() ;
;
Проверяем максимальное отклонение:
![]() .
.
По номограмме, в зависимости от полученных выше значений, для заданной автоматической системы выбираем ПИ-регулятор.
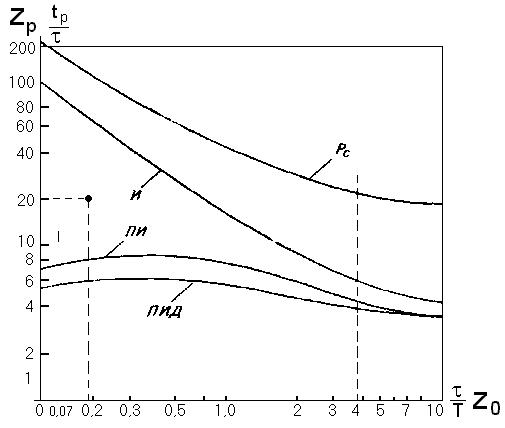
Рисунок 2.3.1 – Номограмма для определения типа регулятора
Для построения линии равной степени
затухания сначала определимся в выборе степени затухания. В большинстве случаев
оптимальная степень затухания находится в пределах ![]() .
Так как процесс является апериодическим, следовательно, берем повышенную
степень затухания
.
Так как процесс является апериодическим, следовательно, берем повышенную
степень затухания ![]() . Этому значению
соответствует степень колебательности m = 0,366.
. Этому значению
соответствует степень колебательности m = 0,366.
1. Путем замены p = (j-m)ω определим РАФЧХ объекта Wоб(m, jω), разложив ее на действительную и мнимую части:
 ;
;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.