



§3.22. Движение твердого тела с одной закрепленной точкой.
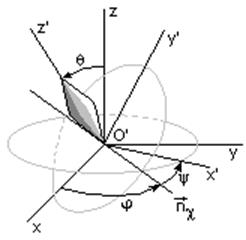
Ряд очень важных практических приложений связан с механическими устройствами, называемыми гироскопами. Рассмотрим задачу о движении твердого тела с одной закрепленной точкой (задача о тяжелом симметричном волчке). Свяжем с волчком подвижные координаты O’x’y’z’. Для определения положения волчка будем использовать углы Эйлера j, y и q, введенные ранее в кинематике. Масса волчка равна m, расстояние от точки опоры волчка до его центра масс равно l.
Для решения задачи необходимо записать кинетическую энергию волчка как функцию независимых обобщенных координат j, y и q и их производных по времени:
 (3.22.1)
(3.22.1)
Для движения твердого тела с одной закрепленной точкой имеют место кинематические формулы Эйлера:
 (3.22.2)
(3.22.2)
Подставляя (3.22.2) в (3.22.1) будем иметь:
 (3.22.3)
(3.22.3)
Волчок
симметричный (![]() ), поэтому выражение (3.22.3)
упростится:
), поэтому выражение (3.22.3)
упростится:

Функция Лагранжа для нашего волчка будет иметь вид:
 (3.22.4)
(3.22.4)
Функция Лагранжа явно от времени и углов j и y не зависит, поэтому можно получить три первых интеграла:
 (3.22.5)
(3.22.5)
 (3.22.6)
(3.22.6)
 (3.22.7)
(3.22.7)
Из (3.22.6) и (3.22.7) можно получить:
 (3.22.8)
(3.22.8)
Подставляя (3.22.8) в закон сохранения механической энергии (3.22.5) найдем дифференциальное уравнение для угла q:
 (3.22.9)
(3.22.9)
Это уравнение имеет решение в элементарных функциях, если при t=0 наклоненный волчок закручен вокруг своей неподвижной оси симметрии и выполняются условия:
![]() (3.22.10)
(3.22.10)
Подставляя (3.22.10) в первые интегралы (3.22.5), (3.22.6) и (3.22.7) получим:
 (3.22.11)
(3.22.11)
Подставляя теперь (3.22.11) в (3.22.9) найдем:
 ; (3.22.12)
; (3.22.12)
откуда
вытекает, что ![]() , так как
, так как ![]() .
Это означает, что наклон оси волчка с течением времени может только
увеличиться.
.
Это означает, что наклон оси волчка с течением времени может только
увеличиться.
Поскольку мы считаем, что волчок сильно закручен, его кинетическая энергия много больше потенциальной. Это означает, что
и
из (3.22.12) также следует, что в любой момент времени ![]() (q мало отличается от q0).
(q мало отличается от q0).
Учитывая это, можно получить приближенное аналитическое решение (3.22.12) разлагая правую часть в окрестности q0 до членов второго порядка малости включительно:
 ; (3.22.13)
; (3.22.13)
Здесь нельзя пренебречь последним членом в правой части, так как Dq2 домножается на большое число.
Используя
обозначения  и
и  перепишем
(3.22.13) в виде:
перепишем
(3.22.13) в виде:
 ; (3.22.14)
; (3.22.14)
Решением
(3.22.14), удовлетворяющим начальным условиям ![]() является
функция
является
функция
В конечном итоге можно получить решение для углов Эйлера и их производных по времени:
 (3.22.15)
(3.22.15)
 (3.22.16)
(3.22.16)
Выражения
для угловых скоростей, усредненных по периоду ![]() имеют
вид:
имеют
вид:
 ; (3.22.17)
; (3.22.17)
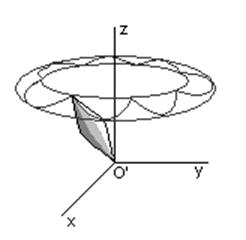 Из
решения видно, что ось z’ медленно прецессирует вокруг вертикали со средней
угловой скоростью
Из
решения видно, что ось z’ медленно прецессирует вокруг вертикали со средней
угловой скоростью ![]() , которая стремится к нулю при
стремлении
, которая стремится к нулю при
стремлении ![]() . Угловая скорость
. Угловая скорость ![]() колеблется
около среднего значения с малой амплитудой и большой частотой
колеблется
около среднего значения с малой амплитудой и большой частотой ![]() . Одновременно ось волчка колеблется с
амплитудой .
. Одновременно ось волчка колеблется с
амплитудой .
Таким образом, в среднем получаем картину регулярной прецессии вокруг вертикали, а на это усредненное движение налагается дрожание оси с малой амплитудой, то есть нутация. Такое движение называется псевдорегулярной прецессией.
§3.23. Теория колебаний. Устойчивость положения равновесия.
Теория колебаний один из самых обширных и развитых разделов теоретической механики, имеющий больное прикладное значение.
Рассмотрим основные свойства малых колебаний механических систем с одной и двумя степенями свободы на основе применения уравнений Лагранжа. Некоторые результаты для системы с любым конечным числом степеней свободы приведем без вывода.
Механическая система может совершать малые колебания только вблизи устойчивого положения равновесия. Обобщенные координаты системы в положении равновесия принимают равными нулю, т.е. отсчитывают их от положения равновесия. Тогда колебательным движением механической системы в общем случае считают всякое ее движение, при котором все обобщенные координаты или часть из них изменяются не монотонно, а имеют колебательный характер, т.е. принимают нулевые значения по крайней мере несколько раз.
Далее будем рассматривать только периодические и псевдопериодические колебания.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.