Результаты расчётов переходных процессов по математической модели кристаллизатора (1 -:- 6) с диаметром изложницы 20 см., представлены на слайде 82, где пространственная координата Z– это уровень металла в кристаллизаторе, м.
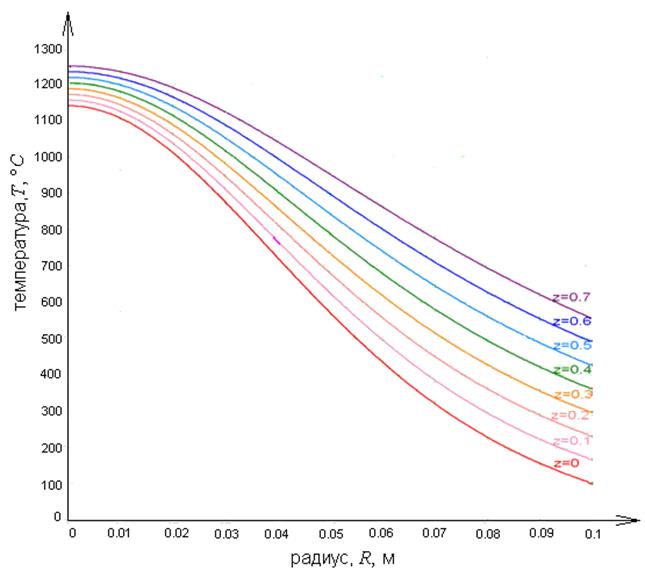
Рис. 7.9 (Слайд 22). - Переходные процессы вдоль радиуса кристаллизатора
Прогноз температуры внешней стенки кристаллизатора позволяет определить задачу эффективности функционирования кристаллизатора системой двух алгебраических уравнений параболического вида:
 |
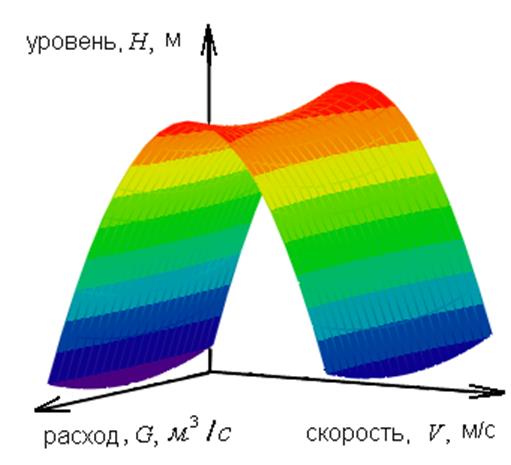
Рис. 7.10. (слайд 23). Визуализация критерия управления в процессе розлива стали
7.4. Методика исследования работоспособности алгоритмов идентификации и эффективности робастных систем
Вершиной создания любой управляющей системы – это синтез алгоритмов идентификации и оптимального управления, которые призваны нивелировать все возмущения приходящие на объект извне (температура окружающей среды) или возмущения, формируемые внутри объекта управления (образование накипи, образование сажевого налета и т.п.). Синтез таких алгоритмов является очень сложным научно-исследовательским процессом и возможен только методами имитационного моделирования процессов управления на специальных стендах. Структурная схема имитационного моделирования процессов контроля и управления такого стенда представлена на рисунке 7.11.
Стенд состоит из блока имитации входных сигналов, эталонной модели объекта управления, алгоритма управления и блока вычисления критерия качества (виртуальный измерительный прибор).
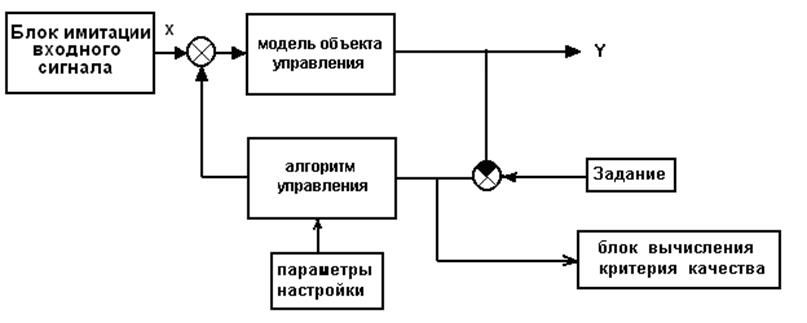
Рис. 7.11 (С. 24). Блок-схема имитационного моделирования процессов управления
Методика имитационного моделирования процессов управления начинается с реализации процесса моделирования переходных процессов в разомкнутой системе, то есть в системе , состоящей из блока имитации входной переменной, эталонной модели и виртуального прибора для измерения критерия качества. На этом этапе главными являются вопросы выбора эталонной модели объекта управления и построение информационной подсистемы в виде виртуального прибора.
При исследовании эффективности работы алгоритмов управления на первый план выдвигаются задачи выбора модели дрейфа, выбор модели помехи измерения.
После реализации этого набора исследовательских задач проводится оптимизация параметров настройки измерительной системы, проводится исследование переходного процесса на предмет чувствительности к изменениям входных параметров, параметров дрейфа и помехам измерения. Для этого добавляется блок вычисления критерия качества управления (это как правило блок вычисления динамической погрешности изменения критерия управления – интегральный среднеквадратический критерий качества управления). И, наконец, на основании исследований чувствительности критериев управления к внешним воздействиям разрабатывается алгоритм управления.
Затем, для каждого алгоритма управления, проводится оптимизация параметров настройки алгоритмов управления и исследуется работоспособность и эффективность управления по разработанному алгоритму управления.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.