– накапливаются
экспериментальные данные по входу, ![]() , и по выходу,
, и по выходу, ![]() , по которым оцениваются величины математических ожиданий по входу
, по которым оцениваются величины математических ожиданий по входу ![]() и по выходу
и по выходу ![]() (блоки 2, 3) и производится центрирование (блоки 4,
5);
(блоки 2, 3) и производится центрирование (блоки 4,
5);
– вычисляется величина производной или величины составляющих градиента по всем направлениям (блоки 6, 7, 9);
– делается шаг в сторону достижения минимального значения критерия оптимизации (блоки 8, 10, 11).
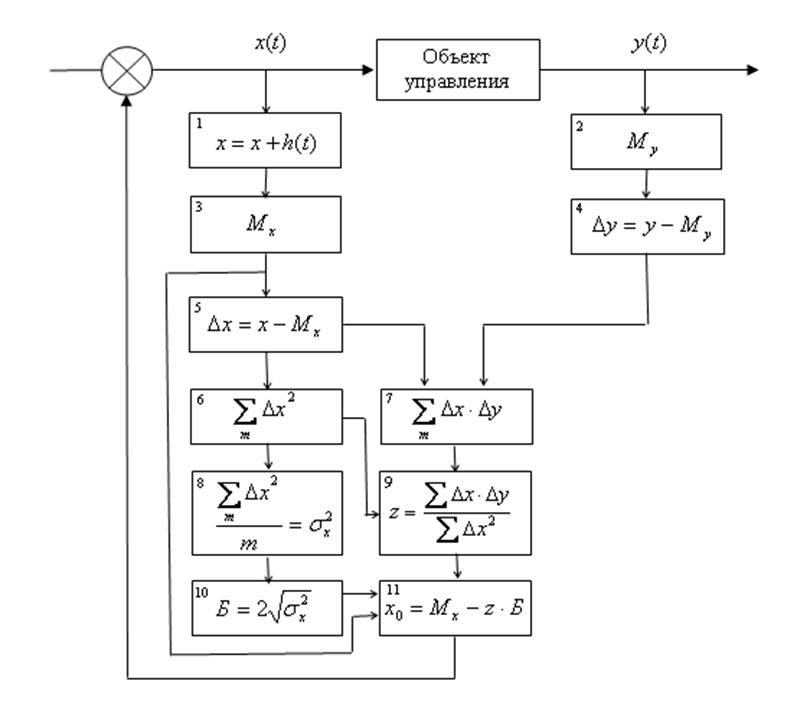
Рис. 2.21 – Блок-схема алгоритма идентификации текущего положения рабочей точки технической системы [1, 2]
Движение в сторону достижения экстремума осуществляется по выражению
 , (2.32)
, (2.32)
где ![]() ,
, ![]() – текущее и предыдущее значения
управляющего воздействия на k-том интервале идентификации; S- настроечный
коэффициент (обычно
– текущее и предыдущее значения
управляющего воздействия на k-том интервале идентификации; S- настроечный
коэффициент (обычно  );
); ![]() - количественная оценка величины и
знака производной в рабочей точке на статической характеристике технической
системы.
- количественная оценка величины и
знака производной в рабочей точке на статической характеристике технической
системы.
Алгоритм позволяет отслеживать дрейф критерия оптимальности и следить за его перемещениями в реальном масштабе времени. Однако данный алгоритм не позволяет точно попасть в оптимум, а только следит за его перемещением. По знаку градиента можно принимать решение о направлении изменения управляющих координат при случайных перемещениях статической характеристики в пространстве управляющих координат. Составляющие вектора градиента могут являться рекомендациями по изменению управляющих воздействий при адаптивном управлении и, позволяют следить за перемещениями статической характеристики технической системы в пространстве управляющих координат.
Основным режимным
параметром функционирования алгоритма является объем информации (![]() ), накапливаемой для обеспечения расчетов по соотношению (2.31, см. рис.
2.22) и оптимальная скважность всех решётчатых функции (цифровых
последовательностей), TS0 , используемых при вычислениях.
), накапливаемой для обеспечения расчетов по соотношению (2.31, см. рис.
2.22) и оптимальная скважность всех решётчатых функции (цифровых
последовательностей), TS0 , используемых при вычислениях.
 |
Рис.2.22. К понятию оптимальной скважности цифровой последовательности
Точность вычислений по формуле (2.31) возрастает при увеличении объема накопления и потери от ошибок идентификации (см. рис 2.22) уменьшаются. Поэтому предпочтительно большое количество измерений. Однако, чем больше измерений, тем дольше происходит накопление информации, тем дальше оптимальный режим «уплывает» и тем больше возрастают потери от скорости дрейфа (см. рис. 2.22). Поэтому существует компромисс между потерями от ошибок идентификации и потерями от скорости дрейфа статической характеристики технической системы. Разрешение данного компромисса – это оптимальная скважность всех решётчатых функции, TS0 (см. рис.2.22), которая обеспечивает оптимальный режим формирования всех цифровых последовательностей технической системы.
Применение рассматриваемого алгоритма особенно выгодно в условиях больших (по амплитуде) изменений входных параметров для малоинерционных и безынерционных объектов, характеристики которых подвержены медленному дрейфу. Достоверность показаний виртуального прибора для оценки величины производной зависят не столько от сложности объекта управления, сколько от точности и чувствительности применяемых технических средств измерения. При этом, на первый план выдвигается разработка алгоритмов визуализации процессов измерения и управления, а основной проблемой является количественно обоснованный выбор критерия эффективности работы энергооборудования.
Алгоритм позволяет отслеживать дрейф оптимального режима и наносить управляющее воздействие, компенсирующее этот дрейф. Однако данный алгоритм не позволяет точно попасть в оптимум, а только следит за его перемещением.
2.3.2 Текущая идентификация динамических свойств технической системы
Требования к математическим моделям динамических связей объекта идентификации, входящих в базу знаний интеллектуальной измерительной системы должны быть идентичными требованиям к математическим моделям, перерабатываемых в технической системе, сигналов, как по форме, так и по содержанию. В пользу этого допущения говорит, хотя бы тот факт, что основным приемом идентификации динамических характеристик в интеллектуальных измерительных системах является решения уравнения свертки как основной модели динамического объекта в задачах управления.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.