Министерство образования и науки Российской федерации
Федеральное агентство по образованию
МОСКОВСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ
/ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ/
«МАИ»
Кафедра 106
Курсовая работа
По управлению движением технической системы
На тему:
Синтез систем управления и анализ ее характеристик.
Консультант
Н.Н. Маркин
Исполнитель
![]() Студент группы 01-314(315)
Г.С. Макеич
Студент группы 01-314(315)
Г.С. Макеич
Москва 2009
1. Характеристика объекта управления и его параметры
Для синтеза систем управления нелинейность заменяется усилительным звеном с коэффициентом усиления равным 1.
После синтеза систамы исследования влияние параметров нелинейности на возникновение автоколебаний и характеристики переходного процесса.
Методические указания:
Постановка задачи:
1. В разделе синтеза систем управления технической системы требуется решить следующие задачи:
ü
Выбрать коэффициент усиления
самолета ![]() для
обеспечения
для
обеспечения
максимальной точности следящей системы и максимальной полосы пропускания и частоты среза при выполнении требований к запасу устойчивости 8дб.
Для минимально фазовой системы необходимо провести линейный анализ по следующим показателям:
- Относительная точность слежения за входным сигналом
- Значение частоты среза
- Амплитудно-частотные характеристики по отклонению и по ошибке замкнутой системы
- Характеристики переходного процесса(время срабатывания, время переходного процесса,относительное перерегулирование)
- Сравнить расположение корней характеристических уравнений разомкнутой и замкнутой систем на комплексной плоскости
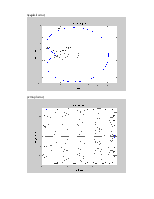
- Построить годограф разомкнутой системы
- Опеределить запасы устойчивости по амплитуде и по фазе
ü Для заданного варианта корректирующего звена и желаемой ЛАФЧХ выбрать параметры,
Для скорректированной системы
решить задачу линейного анализа и уточнить параметры корректирующего звена,
если запасы устойчивости по амплитуде меньше 6дб и запасы устойчивости по фазе
меньше ![]() .
.
Для одного варианта задания исходных данных составить сравнительную таблицу характеристик динамических систем не минимально фазового и минимально фазового типа при использовании различных методов коррекции и желаемых ЛАФЧХ.
2. Анализ влияния параметров нелинейности на характеристики автоколебаний.
В разделе нелинейного анализа на основе метода гармонической линеаризации определить наличие в системе автоколебаний. В случае их отсутствия определить размеры зоны нечувствительности, при которой автоколебания возникнут.
Выполнить иммитационное моделирование с использованием пакета Simulink. Решить следующие задачи:
· Сравнить характеристики переходных процессов для линейной и нелинейной системы
·
Исследовать влияние ширины зон
нечувствительности ![]() , коэффициент усиления линейного участка
, коэффициент усиления линейного участка ![]() и ограничения
и ограничения ![]()
· Исследовать влияние каждого из коэффициентов в 2 раза в каждую сторону
·
Определить значение коэффициента ![]() , при
котором нелинейная система потеряет устойчивость.
, при
котором нелинейная система потеряет устойчивость.
Вариант 5
 |
Исходные данные:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Выбор передаточной функции параллельного корректирующего звена.
При параллельном методе коррекции корректирующее звено выбирается по возможным вариантам цепи обратной связи.

Рассмотрим преобразование структурной схемы:


Условие, при котором обеспечивается устойчивость замкнутой динамической системы и динамическая система обладает желаемыми характеристиками.
Устойчивость замкнутой системы обеспечивается при следующих необходимых и достаточных условиях:
1) передаточная функция замкнутой системы с отрицательной единичной обратной связью должна быть устойчивой и не содержать корней с положительной вещественной частью.
Для устойчивости замкнутой
системы разомкнутая система ![]() может быть устойчивой, либо неустойчивой, но для нее должны выполняться
условия Найквиста, устойчивого в замкнутом состоянии.
может быть устойчивой, либо неустойчивой, но для нее должны выполняться
условия Найквиста, устойчивого в замкнутом состоянии.
2) передаточная функция второго элемента
должна обладать устойчивостью в разомкнутом состоянии и не содержать нулевых корней или корней с нулевой вещественной частью.
3) Потребуем чтобы полоса
пропускания разомкнутого первого контура была больше, чем полоса пропускания
второго звена 
В этом случае полоса
пропускания всей системы не будет превышать полосу пропускания звена
Кроме этого в полосе пропускания неизменяемой части с корректирующим звеном справедливы следующие асимптотические неравенства:
если 
Выбор параметров корректирующего звена в цепи обратной связи.
Рассмотрим передаточную функцию замкнутой системы для типовых корректирующих звеньев.
![]()

1) управляемость замкнутой
системы характеризуется передаточным коэффициентом ![]() и чем он
больше, тем лучше.
и чем он
больше, тем лучше.
2) быстродействие системы
зависит от постоянной времени ![]() и чем она меньше, тем лучше по быстродействию переходный процесс.
и чем она меньше, тем лучше по быстродействию переходный процесс.
![]()
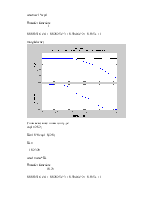
Решение в MatLab:
Выбор коэффициента усиления самолета:
wc1=tf(1, [Ts^2 2*Zis*Ts 1])
Transfer function:
1
----------------------
0.5625 s^2 + 0.9 s + 1
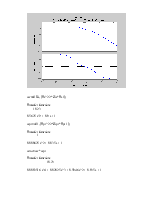
wpr1=tf(1, [Tpr^2 2*Zipr*Tpr 1])
Transfer function:
1
--------------------------
0.000625 s^2 + 0.035 s + 1
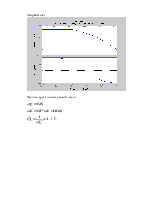
wnc=wc1*wpr1
Transfer function:
1
------------------------------------------------------
0.0003516 s^4 + 0.02025 s^3 + 0.5946 s^2 + 0.935 s + 1
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.