Продолжение табл.5.1
|
1 |
2 |
3 |
|
7 |
Структура кинематических групп: |
|
|
7.1.Группа движения скоро- сти резания: |
||
|
7.1.1.Внутренняя связь |
В1 ®3®2®4®S®5®ix®6®9®В2 |
|
|
7.1.2. Внешняя связь |
М®1®iv®P1®2 |
|
|
7.2.Группа движения подачи: |
||
|
7.2.1.Внутренняя связь |
П3®ВВ®10®iy® Р2®11®S®5® ix®6®7®8®9®B4 |
|
|
8 |
7.2.2.Внешняя связь Настройка движений по параметрам: |
М®1®iv®P1®2®4®S®5®ix®6®is ®P3®10 |
|
8.1. Движение скорости резания |
||
|
8.1.1.на траекторию |
Гитара ix |
|
|
8.1.2.на путь |
||
|
8.1.3.на скорость |
Гитара iv |
|
|
8.1.4.на направление |
Реверс Р1 |
|
|
8.1.5.на исходное положение |
||
|
8.2.Движение подачи: |
||
|
8.2.1.на траекторию |
Гитара iy, реверс Р2 |
|
|
8.2.2.на путь |
Упоры (размер В) |
|
|
8.2.3.на скорость |
Гитара is |
|
|
6.2.4.на направление |
Реверс Р3 |
|
|
6.2.5.на исходное положение |
Упоры(размер Н) |
6. ЗАДАЧИ ПО АНАЛИЗУ И СИНТЕЗУ КИНЕМАТИЧЕСКИХ СТРУКТУР ДЛЯ САМОСТОЯТЕЛЬНОЙ РАБОТЫ
В приводимых ниже вариантах звездочкой отмечены задачи, которые являются более трудными и рекомендуются для решения после изучения соответствующих групп станков.
Задача 1
Проанализировать кинематическую структуру горизонтально-протяжного станка (рис.6.1).
На рисунке обозначено: 1 - заготовка; 2 - протяжка; 3 -ползун; ГД - гидродвигатель (гидроцилиндр).
Литература: /3, с.483-484; 4, с.93-94/.
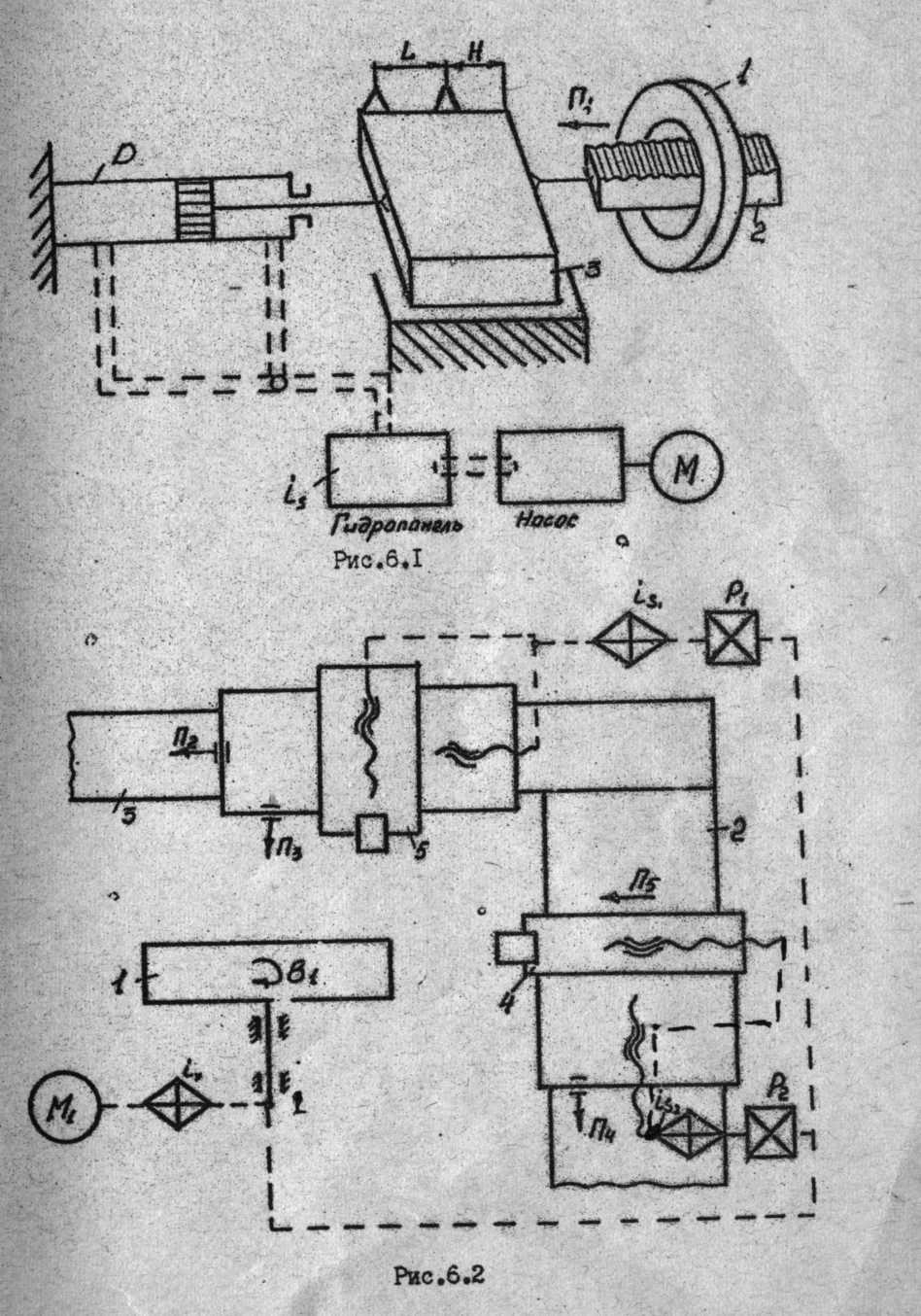
Задача 2
Проанализировать кинематическую структуру токэрно-кару-сального станка (рис.6.2).
На рисунке обозначено: I - планшайба; 2 - стойка; 3 - поперечина; 4 - горизонтальный суппорт; 5 - вертикальный суппорт.
Литература: / 4, c.105-107/.
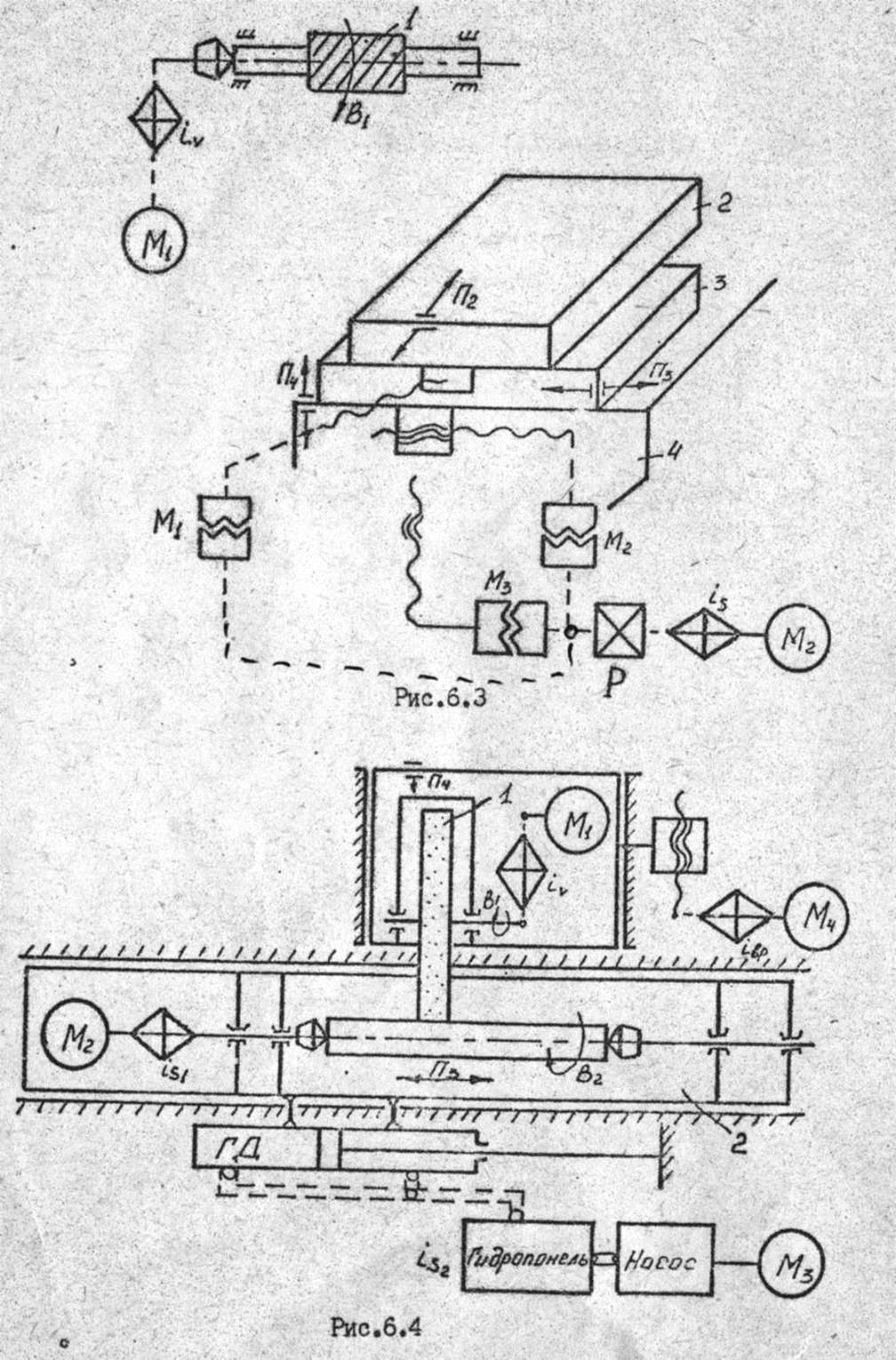
Задача 3
Проанализировать кинематическую структуру горизонтально-фрезерного станка (рис.6.3).
На рисунке обозначено: I - фреза; 2 - стол; 3 - поперечные салазки; 4 - консоль.
Литература: /4, с.112-113/.
Задача 4
Проанализировать кинематическую структуру круглошлифовального станка (рис.6.4).
На рисунке обозначено: I - шлифовальный круг; 2 - стол станка.
Литература: /3. с.483-484; 4, с.45-46/.
Задача 5
Проанализировать кинематическую структуру токарно-вивнторезного станка с ЧПУ (рис.6.5).
На рисунке обозначено: I - шпиндель; 2 - суппорт; УЧПУ устройство числового программного управления.
Литература: /4, с,595-398/.
Задача 6
Проанализировать кинематическую структуру винторезного станка высокой точности с коррекционной линейкой (рис.6.6). На рисунке обозначено; I - коррекционная линейка. Литература: /3, e.519-527; 4, с.254-2617/.
Задача 7
Проанализировать кинематическую структуру бесцентрово-шлифовального станка (рис.6.7,а).о
На рисунке обозначено: I - деталь; 2 - шлифующий круг; 3 - ведущий круг.
Пояснение: ведущий круг 3 (см.рис.6.7,б) устанавливается под некоторым углом к шлифующему кругу 2. Скорость ведущего круга Vвк раскладывается на две составляющие - скорость обрабатываемой детали Vа (движение В2) и осевую подачу S (движение П3).
Литература: /4, с.132-133/.
Задача 8*
Проанализировать кинематическую структуру специального токарно-затыловочного станка для затылования цилиндрических фрез с винтовым зубом остроконечным резцом (рис.6.8).
Пояснение: поперечное перемещение резца осуществляется с помощью кулачка К.
Литература: /3, с.532-545/.
Задача 9*
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.