Одни из наиболее простых устройств циклового программного управления — программаторов — кулачковые командоаппараты. Они представляют барабан, на котором в нужном порядке крепятся кулачки. При вращении барабана кулачок нажимает на путевой выключатель, включающий привод соответствующего звена манипулятора и инициирующий таким образом начало движения звена. Движение звена осуществляется до тех пор, пока закрепленный на нем передвижной упор не дойдет до путевого выключателя, дающего команду на отключение привода перемещающегося звена и включение вращения барабана командоаппарата. Перенастройка такого устройства управления на обработку другой детали состоит в перестановке кулачков на барабане и передвижных упоров.
Другой тип программаторов — штеккерные панели
представляют матрицу из перпендикулярно расположенных друг относительно друга
изолированных шин (металлические полосы). В местах их пересечения находятся
гнезда, в которые могут вставляться штеккеры (металлические штифты),
позволяющие замыкать пересекающиеся шины. К вертикальным шинам присоедини
электрические цепи приводов исполнительных механизмов. Шаговый искатель
последовательно подключает напряжение к каждой из горизонтальных шин. Через
замкнутую с ней штеккером вертикальную шину включается соединенный с ней привод
звена. При перемещении звена регулируемым упором нажимается путевой
переключатель, дающий команду шаговому искателю на подключение следующей
горизонтальной шины.
 |
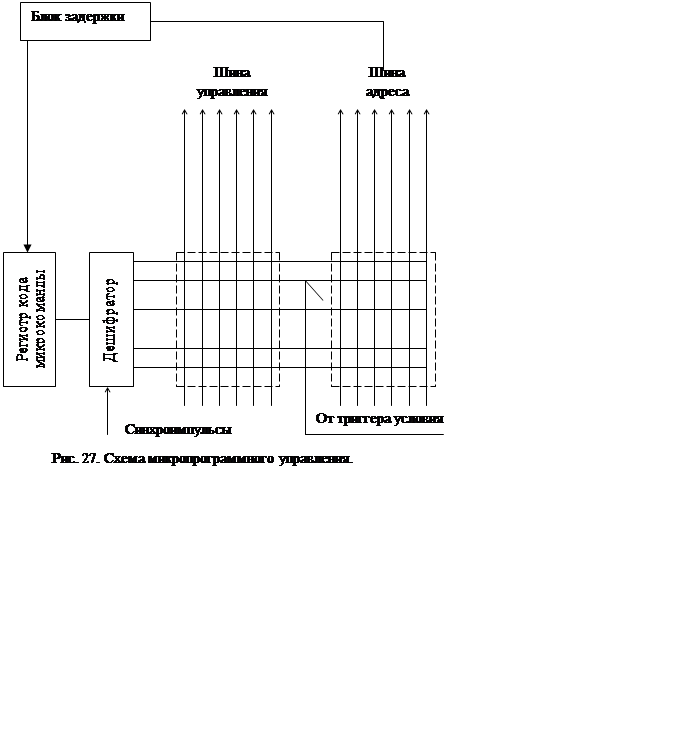
В каждый такт времени при поступлении синхроимпульса дешифратор возбуждает одну из горизонтальных шин в соответствии с тем кодом микрокоманды, который содержится в данный момент в регистре. Горизонтальная шина возбуждает соединенные с ней шины управления, и управляющая часть микрокоманды передается приводам исполнительных механизмов. Одновременно возбуждаются и соединенные с горизонтальной шиной шины, определяющие адрес (или код) микрокоманды, следующей за выполняемой в данном такте. Этот код передается в регистр кода микрокоманды. Возможность ветвления в случае необходимости, например, если не выполнены какие-либо условия, заданные предыдущей микрокомандой, обеспечивается с помощью триггера условия, который может изменить код микрокоманды, выполняемой в следующем такте.
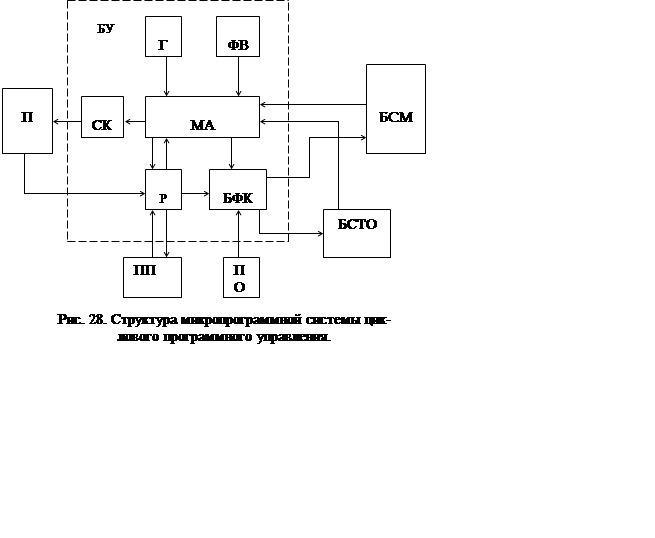
Цикловая система программного управления на основе такого микропрограммного устройства (рис. 28) состоит из блока управления (БУ), программоносителя (П), пульта программирования (ПП), пульта обучения (ПО), блоков сопряжения с технологическим оборудованием (БСТО) и с манипулятором (БСМ).
Блок управления выполняет следующие функции: считывание управляющей информации с программоносителя, запоминание команд на время их выполнения,
дешифровку команд, организует согласованное функционирование всех устройств системы. В него входят: генератор синхроимпульсов (ГС), формирующий сигналы синхронизации; формирователь временных задержек (ФВЗ); счетчик кадров (СК) для формирования адресов команд; микропрограммный автомат (МА), вырабатывающий управляющие воздействия на все операционные узлы блока управления; регистр команд (РК), в котором хранится управляющая информация во время выполнения кадра; блок формирования команд (БФК), через который команды управления передаются блокам сопряжения с манипулятором и технологическим оборудованием.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.