Программоноситель предназначен для записи, хранения и выдачи информации, содержащейся в управляющей программе. Он может быть выполнен на основе электромеханических носителей информации (штеккерные и коммутационные устройства, устройства ввода и вывода на перфокартах, перфолентах), используются также программоносители на основе перепрограммируемых постоянных запоминающих устройств. В зависимости от сигналов, поступающих из счетчика кадров, очередной кадр программы считывается и передается в регистр команд.
Блок сопряжения с манипулятором в соответствии с информацией, содержащейся в кадре, формирует команды управления приводами звеньев манипулятора, контролирует состояние датчиков, оповещает блок управления об окончании отработки кадра.
Блок сопряжения с технологическим оборудованием! обеспечивает обмен дискретной информацией блока управления с технологическим оборудованием.
Для программирования робота используются пульт обучения и пульт программирования. Пульт обучения (ручного управления) снабжен кнопками типа «движение», с помощью которых задается направление движения звеньев робота вручную. С пульта программирования можно ввести программу.
Программа состоит из подпрограмм, которые в свою очередь состоят из команд. Каждая команда содержит две части: первая часть—код операции, вторая—информационная (необязательная). Система команд такова: открыть и закрыть схват; выдержка времена; число одновременно выполняемых команд; начало и конец кадра; номер звена, которое должно двигаться; команды условного перехода, ветвлений и др.
Позиционные системы управления обладают гораздо более широкими технологическими возможностями, применяются для управления роботами с числом степеней подвижности от 3 до 8; в памяти системы могут храниться программы общим объемом до 1500 кадров; система команд включает от 15 до 128 инструкций обмена информацией с внешними устройствами; тип привода - дискретный или следящий; для контроля положения звеньев могут использоваться аналоговые, фазовые или кодовые датчики положения; они могут сопрягаться с другими системами управления, имеют развитые средства контроля и диагностики.
Позиционные системы управления, как и цикловые могут быть созданы на базе микропрограммных автоматов. При этом используются два метода обработки управляющей информации, поступающей на приводы звеньев манипулятора: последовательная и параллельная. В соответствии с этим различают и два основных варианта построения систем управления: централизованную структуру с центральным вычислителем, обрабатывающим информацию последовательно, в режиме разделения времени, и децентрализованную структуру с параллельной обработкой информации для каждой степени подвижности. Конструктивно позиционные системы управления на базе микропрограммного
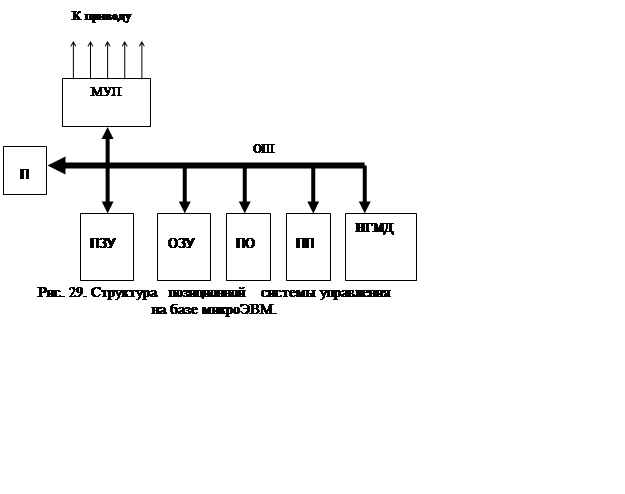 |
Другой подход к созданию позиционной системы управления – использование микроЭВМ – универсальных машин для переработки дискретной информации. В этом случае структура системы управления аналогична традиционной структуре ЭВМ (рис. 29). В основе ее лежит использование унифицированного канала ЭВМ — общей шины (ОШ), представляющей систему проводов со своим устройством управления, обеспечивающих передачу между всеми подключенными к нему устройствами (модулями) адресов, кодов, команд, данных. Через общую шину любое подсоединенное к ней устройство может связаться с любым другим, а также с процессором и передать всю необходимую информацию. Процессор (П) служит для согласования работы всех модулей системы, вычисления и обработки информации о текущем состоянии робота и внешней среды, выработки управляющих воздействий. Программы, выполняющие эти функции, размещены в постоянном запоминающем устройстве (ПЗУ). Пульт программирования (ПП) и пульт обучения (ПО) предназначены для разработки и отладки рабочих программ. Рабочие программы хранятся на внешнем программоносителе—накопителе на гибких магнитных дисках (НГМД). Нужная программа выбирается и передается в оперативное запоминающее устройство (ОЗУ), из которого по команде передается в процессор, обеспечивающий выдачу управляющих воздействий на модуль управления приводом (МУП).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.