На обозримую перспективу основными направлениями применения промышленных роботов первого, второго и последующих поколений будут: автоматизация одиночных операций, выполняемых на универсальном и полуавтоматическом оборудовании и на оборудовании с числовым программным управлением - создание типовых робототехнических комплексов; создание автоматических линий изготовления деталей и сборки с встроенными транспортными, загрузочно-разгрузочными роботами и роботами, выполняющими основные технологические операции; комплексная автоматизация производства с использованием универсального и специализированного оборудования с числовые программным управлением, промышленных роботов различного назначения, транспортных и складских систем с централизованным управлением от ЭВМ.
Вполне понятно, что работы по созданию и внедрению робототехнических систем должны осуществляться не изолированно, а в рамках решения общей проблемы комплексной автоматизации производства.
Такая же техническая политика проводится и в передовых в области робототехники странах - США и Японии. Из насчитывающихся в мире на 1980 г. более 25 000 роботов около половины приходилось на эти две страны. В 2000 году на эти две страны будет приходиться около 2/3 всего парка промышленных роботов в мире. В США есть примеры надежной работы промышленных роботов по две и даже по три смены все семь дней недели. При этом производительность труда увеличивается в 2-10 раз, срок окупаемости составляет обычно 1-3 года.
При использовании 20 промышленных роботов для точечной сварки днища кузова фирма "Дженерал-Моторс" на автосборочном заводе в г. Вилмингтоне осуществила выпуск новой модели легкового автомобиля всего за 9 недель вместо обычно требующихся для этого 30-36 месяцев.
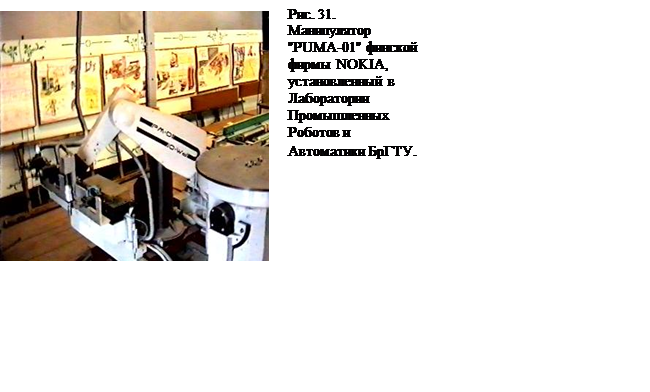 |
Фирмой "Юнимейшн" созданы две модели промышленных роботов, предназначенных для сборки небольших механических узлов и установки радиодеталей типа резисторов, конденсаторов, диодов и светодиодов в печатные платы - "Пума-250" и "Пума-500". Каждый из серводвигателей управляется микропроцессором, в свою очередь все пять микропроцессоров манипулятора управляются цифровой микро-ЭВМ. Робот "Пума-250" оснащен электронными устройствами и датчиками, с помощью которых он может опознавать, захватывать неориентированные детали и подавать их в ориентировочном положении к месту сборки. Стоимость I ч работы робота в среднем в 3 раза меньше стоимости I ч работы человека на сборочном конвейере. По сравнению с другими роботами, роботы серии "Пума" являются относительно несложными и достаточно универсальными. Советский аналог этого робота "Сфера-36", с манипулятором "PUMA-01", финской фирмы "Нокиа" установлен в лаборатории промышленных роботов Братского Технического Университета.
Фирмой "Кавасаки-Дзюкогё" создана автоматизированная линия сборка небольшого двигателя внутреннего сгорания с применением промышленных роботов "Кавасаки Юнимейт". Из 12 позиций линии на двух используется труд слесарей-сборщиков потому, что применять роботы на этих операциях неэкономично. Схваты роботов за счет применения чувствительных элементов могут отличать переднюю и заднюю стороны детали и отбрасывать бракованные винты. В некоторых случаях операции выполняются одновременно руками двух роботов, а для запрессовки отдельных деталей на линии используются небольшие специализированные прессы. При завинчивании винтов и гаек употребляется специальный инструмент. На линии предусмотрена автоматическая замена схватов роботов. Централизованное управление осуществляется от ЭВМ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.