1. Методика подбора поперечного сечения гибкого сжатого стержня
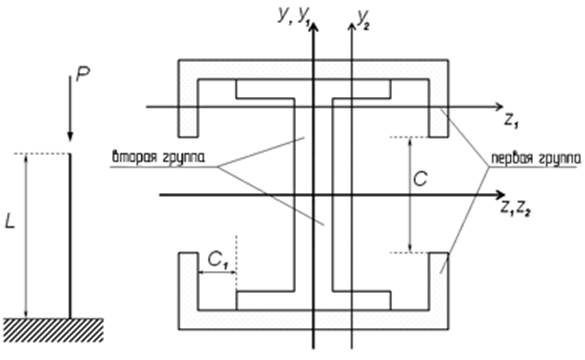
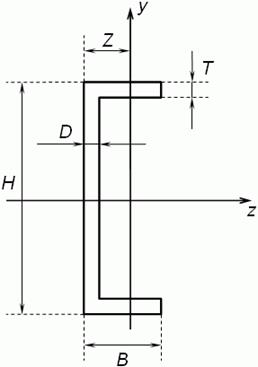
рис. 1.1. Стойка и её поперечное сечение рис 1.2. Швеллер
В качестве сложного, составного сечения, подбираемого в индивидуальном домашнем задании, рассматриваются симметричные сечения, составленные из двух типов простых фигур (комбинации уголков, двутавров, швеллеров, полос). Варианты индивидуальных заданий приведены в приложении данных методических указаний.
Подбор поперечных сечений сжатых стержней выполняется методом последовательных приближений. Сечение считается подобранным, если с пятипроцентной точностью (перегрузка или недогрузка не более 5%) выполняется условие устойчивости:
где s - нормальное напряжение в сечении стержня;
Р– осевая сжимающая нагрузка;
F – площадь поперечного сечения;
j(l) – коэффициент уменьшения допускаемых нормальных напряжений [s] материала стержня, зависящий от его гибкости l.
В дальнейшем методика расчета изложена для одного конкретного сечения.
1.1. Условие задания и порядок расчета
Подобрать сечение стойки из четырех одинаковых швеллеров (рис. 1.1.), если Р=900 кН; L=4м; [s]=160 * 103 кПа.
Подобрать поперечное сечение – это значит указать необходимый номер швеллера, который определяет и все основные размеры: H, D, Z, B, T (рис.1.2) и геометрические характеристики: площадь сечения F, осевые моменты инерции JZ и JY, обозначенные J1 и J2.
В первом приближении принято назначать коэффициент уменьшения основного расчетного сопротивления j=0,5 и определять общую площадь сечения согласно (1.1) по формуле:
 . (1.2)
. (1.2)
Тогда площадь одного швеллера
 (1.3)
(1.3)
Затем для составленного сечения последовательно находят:
· осевые моменты инерции –


· радиус инерции сечения –
· гибкость стержня –
 .
.
В качестве Jmin выбирается наименьший момент инерции из Jzå , Jyå. В формуле (1.7) m – коэффициент приведения длины, учитывающий характер закрепления концов стойки, в программе обозначен M.
По найденной гибкости l вычисляют новое, уточненное значение коэффициента уменьшения основного расчетного сопротивления j1. Обычно величину j определяют с помощью специально составленных таблиц. Поскольку в приводимом расчете предполагается использование ЭВМ, приведем аналитические зависимости, позволяющие находить j1:
|
|
(1.8) |
|
|
(1.9) |
|
|
(1.10) |
Результаты расчета оцениваются по значению ошибки между действительными напряжениями sд в стойке и допускаемыми напряжениями устойчивости j1* [s]:
|
|
(1.11) |
Если ошибка превышает 5%, то для второго приближения выбирается
|
|
(1.12) |
и расчет повторяется.
Действительное напряжение в стойке
|
|
(1.13) |
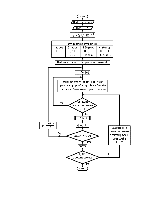
2. Структурно-параметрическая схема алгоритма решения и подготовка задачи к диалоговому режиму работы на ЭВМ.
Структурно-параметрическая схема алгоритма решения, соответствующая методике расчёта, изложенной в разд. 1, приведена на рис.2.1.
Имея целью освободить студента от набора всех размеров и геометрических характеристик прокатных профилей, которые используются при решении задачи, в память машины введён сортамент прокатных профилей, и студенту достаточно указать лишь номер профиля.
Студент вводит значения нагрузки p, длины стойки L и коэффициента закрепления концов стержня M.
Выше отмечалось, что в задании предложены только симметричные сечения, состоящие из двух типов простых сечений. В нашем конкретном случае (см. рис. 1.1) хотя сечение состоит из четырёх одинаковых швеллеров, программа требует разбиения их также на две группы.
Отнесём к первой группе горизонтально расположенные швеллеры и для обозначения размеров и геометрических характеристик сечения используем символы:
|
(2.1) |
H (Ø), B (Ø), D (Ø), T (Ø), Z (Ø), F (Ø), J1 (Ø), J2 (Ø).
|
(2.2) |
Ко второй группе отнесём вертикальные швеллеры, для которых введём обозначения:
H (1), В (1), D (1), T (1), Z (1), F (1), J1 (1), J2 (1).
Соответствующие коды первой и второй групп элементов сообщаются ЭВМ.
|
(2.3) |
Поскольку не при любых произвольных размерах сечение, изображенное на рис. 1.1, может быть реализовано, следует сформулировать условия реальности сечения. В рассматриваемом конкретном варианте сечения такими условиями являются:
C>0 и C1>0.
Эти условия автоматически проверяются программой, и соответствующий анализ выдается на экран дисплея. Однако предварительно студент должен записать на языке Бейсик аналитические выражения для соответствующих условий и набрать их с клавиатуры как команды с номерами 385 и 386. В приводимом примере эти команды будут выглядеть следующим образом:
385 c=h(1)+d(Ø)*2–2*b(Ø)
(2.4)
386 c1=h(Ø)/2–b(1)–t(Ø)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.


 ;
; .
. ,
, ,
, .
.