![]() >0, что свидетельствует о том, что
скорректированная система является устойчивой.
>0, что свидетельствует о том, что
скорректированная система является устойчивой.
5.3 Оценка качества переходного процесса
На основе (5.5) можно записать операторное уравнение:
![]()
![]() (5.11)
(5.11)
Пусть ![]() , тогда на основе (5.11) можно
записать уравнение в символической форме:
, тогда на основе (5.11) можно
записать уравнение в символической форме:
![]() , (5.12)
, (5.12)
где ![]()
На основе (2) можно записать:
 . (5.13)
. (5.13)
В соответствии с методом последовательного интегрирования, уравнению (5.13) соответствует следующая система дифференциальных уравнений в форме Коши:
 (5.14)
(5.14)
Пусть для решения системы уравнений (5.14) используется метод Эйлера, в котором

где ![]() - шаг интегрирования.
- шаг интегрирования.
На основе (5.14) окончательно можно записать:
 (5.15)
(5.15)
Переходный процесс по возмущающему воздействию в скорректированной системе представлен на рисунке.
На основе рисунка можно определить следующие значения показателей качества переходного процесса:
1. Время регулирования – 1,115 c.
2.
Величина перерегулирования  .
.
3. Вид переходного процесса – колебательный.
4. Частота собственных колебаний – fk = 3,47.
5. Период собственных колебаний –Tk = 0,288.
6. Количество колебаний – 4.
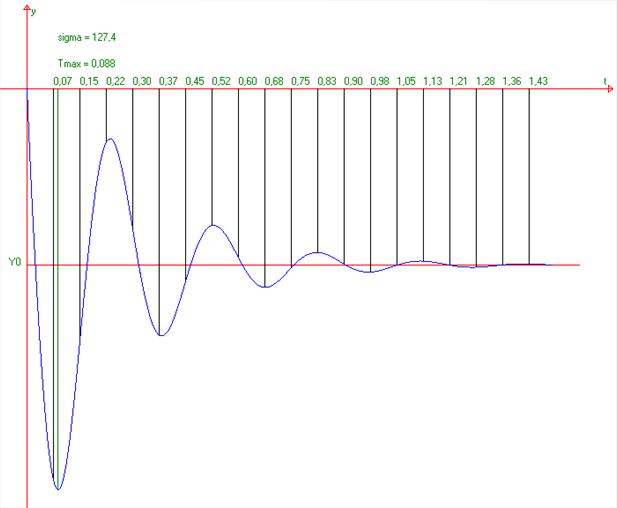
Рисунок 5.4 – Переходный процесс скорректированной системы.
Приложение А
uses crt, graph;
const path = 'C:\bp\bgi';
mash = 220;
var
T,T0,T2,T3,dx1,Tre,Tmax,Per,tr,sigma,a0,a1,a2,a3,b0,b1,b2,tt,h,tpr,y, y1, y2, y3,pr,ymax,ymax1:real;
i,j,Krs,z,Kz,gd,gm:integer;
zn1,zn2,zn3:boolean;
mast, masy, maspr:array[1..1500] of real;
f: text;
procedure Initab;
begin
a3:=T0*T2*T3; a2:=T0*T2 + T0*T3 + T2*T3;
a1:=T0 + T2 + T3; a0:=Krs + 1;
b2:=Kz*T*T0; b1:=Kz*(T0 + T);
b0:=Kz; h:=a1/(10*a0);
tt:=0;pr:=0;
end;
function newY:real;
begin
pr:=b2/a3*z - a2/a3*y + y2;
y2:=y2 + h*(b1/a3*z - a1/a3*y + y3);
y3:=y3 + h*(b0/a3*z - a0/a3*y);
y1:=y1 + h*pr;
newY:=y1;
end;
procedure grafik;
var zz: integer;
st: string;
begin
gd:= detect;
initgraph(gd, gm, path);
settextstyle(2, horizdir, 0);
str(sigma:3:1,st);
st:='S='+st+'%';
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.