По выражению (4.14) видно что корни характеристического уравнения находятся внутри единичной окружности, что свидетельствует о устойчивости дискретной системы.
5 Построение ЛАЧХ системы и её анализ
Для построения функции слежения за частотой выходного вала в проектируемой ЛСАУ в цепь обратной отрицательной связи включён преобразователь, который преобразует текущую частоту на выходном валу в напряжение. Тахогенератор выполняет преобразование величин по закону
![]() ,
,
где kтг=0,22 B/c – крутизна характеристики тахогенератора;
Ω – текущая частота вращения выходного вала.
 Сигнал с
тахогенератора сравнивается с сигналом задатчика частоты вращения реализованным
программно в МПС. Задатчик преобразует числовой код частоты вращения заданный
программно в числовой код напряжения
Сигнал с
тахогенератора сравнивается с сигналом задатчика частоты вращения реализованным
программно в МПС. Задатчик преобразует числовой код частоты вращения заданный
программно в числовой код напряжения
![]() ,
,
где kз – коэффициент преобразования задатчика;
ω – заданная частота вращения выходного вала.
 Измеритель
рассогласования (ИР), выполненный также программно, вычисляет отклонение
сигнала от заданного. На выходе ИР имеется сигнал
Измеритель
рассогласования (ИР), выполненный также программно, вычисляет отклонение
сигнала от заданного. На выходе ИР имеется сигнал
![]() .
.
 Для построения ЛАЧХ
разомкнутой и анализа системы необходимо наличие обратной единичной
отрицательной связи, для этого, учтя рассуждения выше, реализуем программно
выполнение условия
Для построения ЛАЧХ
разомкнутой и анализа системы необходимо наличие обратной единичной
отрицательной связи, для этого, учтя рассуждения выше, реализуем программно
выполнение условия
![]() .
.
 Тогда
Тогда
![]() .
.
где δ – отклонение текущей частоты от заданной.
В результате структурная схемы проектируемой ЛСАУ примет вид рисунка 5.
Рисунок 5 – Структурная схема ЛСАУ
 Тогда передаточная
функция разомкнутой системы
Тогда передаточная
функция разомкнутой системы
![]() .
.
Или при подстановке выражений для передаточной функции
 ,
,
 Окончательно
передаточная функция разомкнутой системы
Окончательно
передаточная функция разомкнутой системы
 .
.
Для получения Z формы передаточной функции выполняется следующее
 .
.
Табличная формула перехода к Z форме по полученному выражению (5.9) в форме изображения по Лапласу
 .
.
Тогда передаточная функция разомкнутой системы в Z форме
 .
.
После подстановки коэффициентов и упрощения передаточная функция примет вид
 .
.
Для построения ЛАЧХ делается билинейное преобразование, для этого осуществляется подстановка
 .
.
После подстановки и упрощения передаточная функция
 .
.
Переходя к псевдочастоте передаточная функция
 .
.
Действительная часть передаточной функции
 .
.
Мнимая часть передаточной функции
 .
.
Амплитудночастотная характеристика системы
 .
.
При подстановке в (5.18) выражений мнимой и действительной частей
 .
.
 ЛАЧХ разомкнутой
системы вычисляется
ЛАЧХ разомкнутой
системы вычисляется
![]() .
.
При вычислении и упрощении выражение (5.20) примет вид
 .
.
ЛФЧХ системы определяется
 .
.
При вычислении и упрощении выражение (5.22) примет вид
 .
.
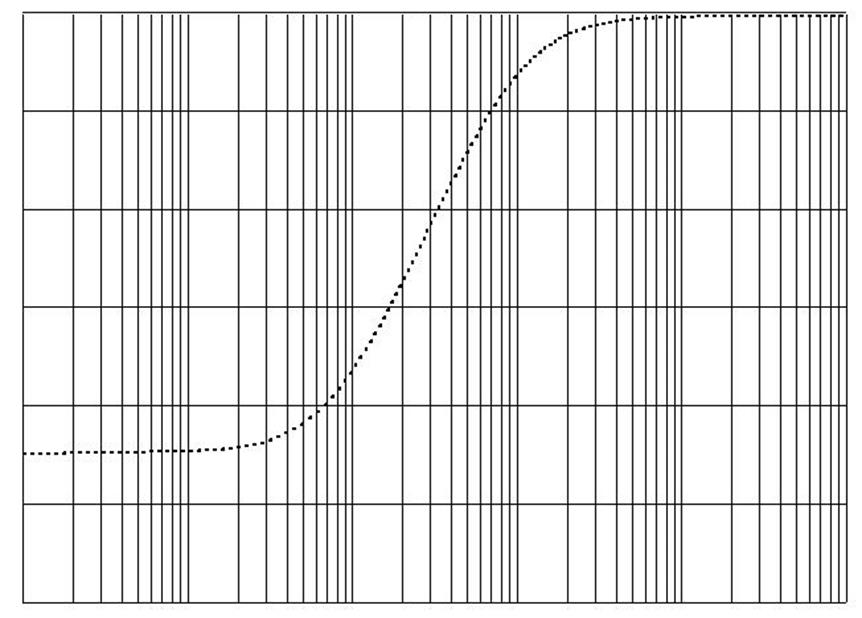
ЛАЧХ и ЛФЧХ разомкнутой системы изображены на рисунке 6.
![]()
![]()


![]()







![]()









![]()







 |
|||||
 |
|||||
 |
|||||
Рисунок 6 – ЛАЧХ и ЛФЧХ системы.
По ЛАЧХ и ЛФЧХ видно что запас устойчивости по амплитуде и фазе равны бесконечности.
6 Построение ЖЛАЧХ системы, ЛАЧХ корректирующего устройства
Для построения ЖЛАЧХ определяется рабочая точка (РБ) системы.
 Пусть на входе системы
(задатчик) действует частота изменяющаяся по закону
Пусть на входе системы
(задатчик) действует частота изменяющаяся по закону
![]() ,
,
где w0 – амплитудное частоты на входе системы, 1/с;
w1 – частота изменения сигнала на входе, 1/с;
Скорость изменения частоты вращения вала
 .
.
Ускорение частоты вращения вала

 .
.
 Введём обозначение
Введём обозначение
![]() ,
,
![]() ,
,
где ε0 – амплитуда скорости изменения частоты вращения вала, 1/с2;
εН – ускорение в нагрузке, 1/с2;
g0 – амплитуда ускорения изменения частоты вращения вала, 1/с3;
gH – скорость изменения ускорения в нагрузке, 1/с3.
Тогда рабочая частота системы
 ,
,
где gH=1,8 с-3 – скорость ускорения в нагрузке;
εН=2,1с-2 – ускорение в нагрузке, 1/с2.
 .
.
 При переходе к
псевдочастоте
При переходе к
псевдочастоте
 .
.
Частота качания на входе системы
 .
.
 .
.
В логарифмическом масштабе
 ,
,
 где δгар
– заданная в ТЗ точность управления, с-1.
где δгар
– заданная в ТЗ точность управления, с-1.
 .
.
Окончательно РБ имеет координаты (0,857;9,722).
По ТЗ система в динамическом режиме должна удовлетворять следующим условиям:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.