












Теоретические исследования работы жестких нитей в двухполюсной радиально - вантовой системе
Основные положения.
Основными несущими элементами в двухполюсной радиально - вантовой системе являются гибкие и жесткие нити.
Жесткой нитью будем называть криволинейный провисающий стержень, имеющий определенную изгибную жесткость, закрепленный концами на опорах и держащий нагрузку, главным образом, благодаря осевому растяжению.
Жесткая нить подобна арке – криволинейному, выпуклому стержню и отличается от нее тем, что арка имеет кривизну, противоположную нити и держит нагрузку в результате сжатия. Поэтому иногда жесткую нить называют обратной аркой. Она имеет определенную форму, полученную или изготовленную, и сопротивляется ее изменению.
Теория жесткой нити является обобщением теории нити, в которой гибкая нить будет представлять частный случай.
При загружении двухполосного радиально - вантового покрытия вертикальной нагрузкой в нитях будут возникать перемещения как в вертикальной, так и в горизонтальной плоскостях. При этом диагональный элемент, связанный с нитями, не дает свободно им перемещаться, от него они получают определенные воздействия, которые будут тем значительнее, чем ближе к опорному контуру находится нить. Для средней нити, если пренебречь этими воздействиями, можно нить рассматривать как бы перемещающейся свободно, не связано с системой, что упрощает ее расчет и исследование.
При расчете свободно провисающих нитей использованы следующие допущения:
1. Рассматриваются нити с малыми стрелками провисания (1/8 пролета и менее). При этом усилия в нити мало меняются по длине, а длина мало отличается от пролета .
2. При действии нагрузок материал нити подчиняется закону Гука.
3. Для нити конечной
изгибной жесткости принята техническая теория изгиба M = - EJ-
4. Момент инерции относительно вертикального сечения имеет постоянное значение по длине нити.
Для расчета жестких нитей, мы будем использовать методику Н.С.Москалева ( ) . Автором получены формулы для определения прогибов и распоров, которые удобны для практических расчетов, а также позволяют выполнить анализ работы жестких нитей и назначить рациональные параметры.
 Рассмотрим жесткую нить с
шарнирными опорами, расположенными на одном уровне. До приложения нагрузки нить
имела исходное очертание, соответствующее ординатам Z. Под нагрузкой
(рассматривается только вертикально действующая нагрузка) в нити возникает
распор Hi и появляются вертикальные перемещения W.
Рассмотрим жесткую нить с
шарнирными опорами, расположенными на одном уровне. До приложения нагрузки нить
имела исходное очертание, соответствующее ординатам Z. Под нагрузкой
(рассматривается только вертикально действующая нагрузка) в нити возникает
распор Hi и появляются вертикальные перемещения W.
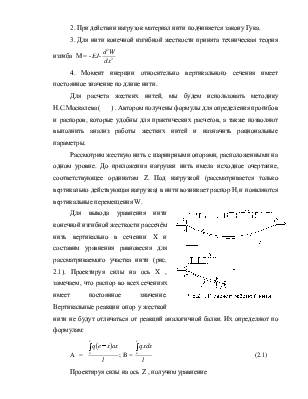
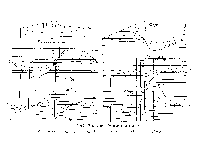
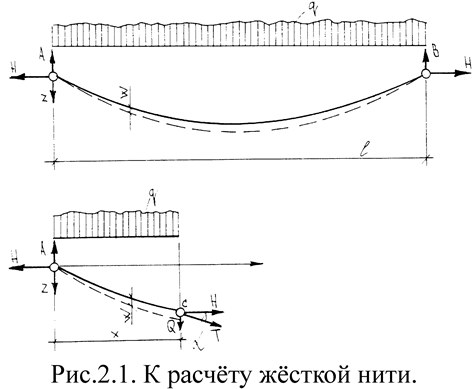
Для вывода уравнения нити конечной изгибной жесткости рассечём нить вертикально в сечении X и составим уравнения равновесия для рассматриваемого участка нити (рис. 2.1). Проектируя силы на ось X , замечаем, что распор во всех сечениях имеет постоянное значение. Вертикальные реакции опор у жесткой нити не будут отличаться от реакций аналогичной балки. Их определяют по формулам:
A![]() =
=![]()
 ; B =
; B =  (2.1)
(2.1)
Проектируя силы на ось Z , получим уравнение
A -  , (2.2)
, (2.2)
где A -  - сумма внешних сил слева;
- сумма внешних сил слева;
 Q
Q![]() - сумма касательных направлений,
взятая по всему сечению.
- сумма касательных направлений,
взятая по всему сечению.
Из уравнения (2.2)
определяем вертикальную составляющую тяжения Qж она равна Htg![]() - Q
- Q![]() .
Тангенс угла наклона тяжения будет
.
Тангенс угла наклона тяжения будет
tg![]() =
-
=
-  .
.
Уравнение моментов, взятое относительно точки C, расположенной на оси нити, имеет вид
Aх -  ж ( z + w ) - m = 0
( 2.3 )
ж ( z + w ) - m = 0
( 2.3 )
где Ax -  - момент, равный изгибающему моменту в
аналогичной балке , m-момент, изгибающий нить.
- момент, равный изгибающему моменту в
аналогичной балке , m-момент, изгибающий нить.
Решая уравнение ( 2.3 ) относительно распора , получим
H= 
Тяжение находим из формулы
T= 
Момент m, изгибающий нить, можно определить, пользуясь приближенной теорией изгиба прямолинейных брусьев. Кривизну нити ввиду пологости не учитываем .
Тогда m= - E J w" ,
где EJ - изгибная жесткость нити, причем момент инерции взят относительно вертикального сечения; w" - вторая производная прогиба.
Выражение (2.3) приобретает вид уравнения прогибов, известного из теории висячих мостов:
E J w" - H(z + w) + M = 0 (2.4)
Уравнение (2.4) описывает не исходное, а деформированное состояние жесткой нити. Оно не будет иметь решения до тех пор, пока распор не станет известен. В теории висячих мостов нахождение распора составляет одну из основных трудностей расчета, в связи с чем разработано много методов для его определения. Воспользуемся уже известной из теории нити формулой длины кривой в силовой трансформации, которая является дополнительным уравнением, недостающим при решении. Под нагрузкой нить удлиняется на величину DS и выражение получит вид:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.