Построение высокочастотен зоны проводим, исходя из наиболее простой реализации корректирующего звена.
5. Вычитая из ЛАХ неохваченных звеньев желаемую ЛАХ, получим ЛАХ звена местной обратной связи. ЛАХ неохваченных звеньев построена по выражению
![]()
Передаточная функция звена местной обратной связи имеет вид:
Реализовать корректирующее устройство можно с помощью тахогенератора, двух RС -цепочек и согласующего усилителя (рис. 13).
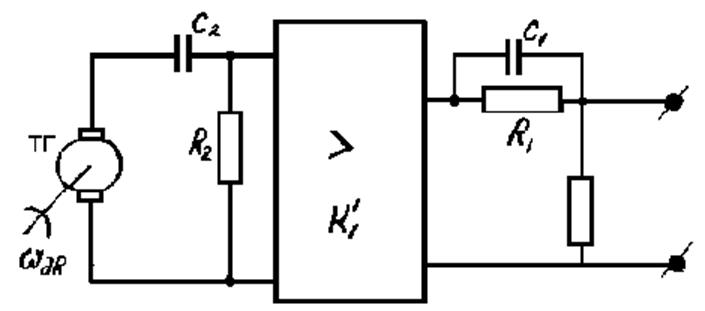
Рис. 13. Схема коррекции
Передаточная функция этого устройства следующая:
Постоянные времени Т1 , Т2
определяются из рис. 13. Постоянную Т3выбираем таким
образом, чтобы ее влиянием на |Woc(P)| можно было пренебречь. В этом случае передаточные функции ![]() и
и
![]() практически одинаковы.
практически одинаковы.
ПРЕИМУЩЕСТВА И НЕДОСТАТКИ РАЗЛИЧНЫХ ТИПОВ КОРРЕКЦИИ
Корректирующие звенья последовательного типа особенно удобно использовать в тех случаях, когда в САУ используется электрический сигнал в виде напряжения постоянного тока, при этом во многих случаях последовательное корректирующее звено может быть реализовано в виде простых пассивных RC - конструкторов. В этом состоит преимущество последовательной коррекции.
К недостаткам последовательных корректирующих устройств относятся следующие:
1. Последовательные корректирующие звенья чувствительны к изменениям технических параметров системы (коэффициента усиления, постоянных времени), поэтому при последовательной коррекции к стабильности параметров элементов предъявляются повышенные требования.
2. Дифференцирующие фазоопережающие RC - контуры чувствительны к высокочастотным помехам.
3. Последовательные интегрирующие RC -контуры содержат более громоздкие конденсаторы, чем контуры в цепи обратной связи.
Местные обратные связи находят наибольшее распространение вследствие простоты технической реализации. Преимущества коррекции с помощью местных обратных связей состоят в следующем:
1. Сигнал на вход обратной связи поступает сравнительно высокого уровня (с выходного каскада усилителя, иногда даже непосредственно с выхода САУ), что позволяет избежать затруднений с питанием корректирующего устройства.
2. Уменьшается зависимость показателей качества САУ от изменений параметров ее элементов вследствие воздействия внешних фак-
торов, поскольку в зоне существенных
частот при ![]()
![]() динамические
свойства участка охваченного местной обратной связью,определяются в основном
свойствами корректирующего устройства.
динамические
свойства участка охваченного местной обратной связью,определяются в основном
свойствами корректирующего устройства.
3. Отрицательно обратные связи уменьшают влиять нелинейностей тех участков цепи регулирования, которые ими охватываются, т.е. нелинейные характеристики звеньев, охваченных обратной связью, "линеаризуются".
4. Местная обратная связь работает при меньшем уровне помех, чем последовательные корректирующие звенья, ибо сигнал на входе обратной связи проходит через САУ, которая является хорошим фильтром низких частот. Поэтому эффективность действия звена обратной связи при наложении помех на сигнал ошибки снижается меньше, чем последовательного корректирующего устройства.
Недостатки коррекции с помощью обратных связей заключаются в следующем:
1. Обратные связи часто имеют дорогостоящие элементы (тахоге-нераторы; дифференцирующие трансформаторы).
2. Контур, образованный местной обратной связью, может сам по себе быть неустойчивым.
3. Появляются определенные трудности при суммировании сигналов ошибки и местной обратной связи, поскольку необходимо, чтобы обратная связь не шунтировала вход усилителя, к которому она подводится.
Звенья параллельного типа удобно применять в тех случаях, когда необходимо осуществить сложный закон регулирования с введением интеграла и производных от сигнала ошибки. Примером использования звеньев параллельного типа является применение изобромных устройств. Последовательная коррекция в основном используется в маломощных системах, что объясняется простотой последовательных корректирующих устройств, а также целесообразностью применения в маломощных системах громоздких, соизмеримых с размерами исполнительного двигателя таких элементов обратных связей, как тахогенераторы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.