Если корректирующее устройство вводится в систему согласно рис.10, то такое корректирующее устройство называют параллельным ( корректирующее устройство включено в цепь местной обратной связи ).
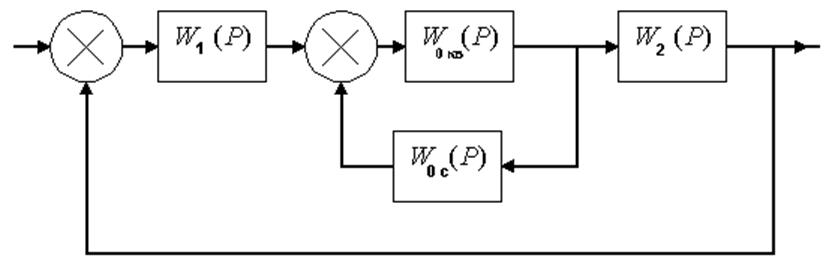
Рис. 10. Система параллельной коррекцией
Из структурной схемы имеем:
 (8)
(8)
 (9)
(9)
или
 (10)
(10)
При частотах, когда
![]() ,
,
можно считать, что
 (11)
(11)
т.е. на этих частотах корректирующее устройство не влияет на свойства системы.
При частотах, для которых
![]() (12)
(12)
имеем:

или
 (13)
(13)
Таким образом, при ![]() качество процесса регулирования в системе
не зависит от параметров звеньев, охваченных обратной связью. Поэтому
корректирующей обратной связью желательно охватывать звенья систем с наиболее
нестабильными параметрами или наименее устойчивые звенья. Обычно такими
звеньями являются усилительно-преобразовательные устройства САУ.
качество процесса регулирования в системе
не зависит от параметров звеньев, охваченных обратной связью. Поэтому
корректирующей обратной связью желательно охватывать звенья систем с наиболее
нестабильными параметрами или наименее устойчивые звенья. Обычно такими
звеньями являются усилительно-преобразовательные устройства САУ.
Логарифмируя (13), получим:
![]()
Откуда ЛАХ корректирующего звена равна:
![]() (15)
(15)
Таким образом, для определения ЛАХ Loc параллельного корректирующего устройства необходимо:
1. Построить ЛАХ Lн с.р. исходной нескорректированной системы.
2. Построить желаемую ЛАХ Lж .
3. Определить звенья, которые целесообразно охватить корректирующей обратной связью и построить ЛАХ Lохв .
4. Определить ЛАХ Lос , для чего из ЛАХ нескорректированной системы Lнс вычесть ЛАХ Lохв и Lcк =Lж .
5. По найденной Lос , используя таблицы типовых корректирующих звеньев, выбрать схему корректирующего устройства и определить его параметры. При сложных корректирующих звеньях, включенных последовательно, необходимо применять развязывающие усилители.
Логарифмическую характеристику Lос можно получить на основании выражения ( 12 ) следующим образом:
![]()
Следовательно,
![]() (16)
(16)
т.е.
для определения ![]() можно из Lнеохв звеньев, неохваченных корректирующей обратной связью,
вычесть Lск=Lж.
можно из Lнеохв звеньев, неохваченных корректирующей обратной связью,
вычесть Lск=Lж.
После определения Loc следует:
·
поверить на устойчивость
внутренний замкнутый контур ( построить Loxв
+Loc , ![]() );
);
· определить ЛАХ внутреннего замкнутого контура, используя номограммы замыкания;
· получить уточненную ЛАХ Lск и построить ФЧХ скорректированной системы;
·
уточнить запасы по модулю ![]() , по фазе
, по фазе ![]() и
определить показатели качества переходного процесса.
и
определить показатели качества переходного процесса.
Пример 2. Определить тип и параметры параллельного корректирующего устройства следящего привода, структурная схема которого приведена на рис. 11.
Система должна удовлетворять следующим показателям качества:
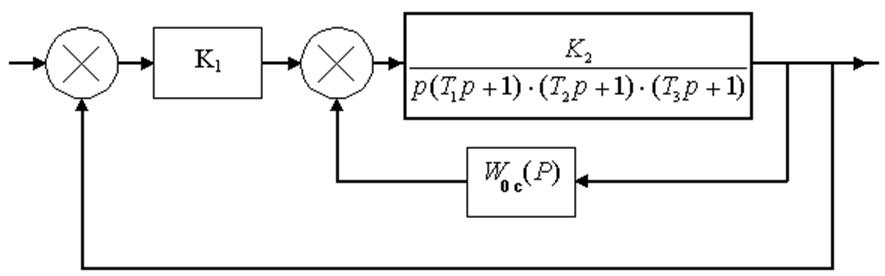
Рис. 11. Структурная схема следящего привода
· Ошибка системы при  ,
,  не должна превышать
не должна превышать ![]() ;
;
· При единичном ступенчатом воздействии
![]()
![]()
Параметры неизменяемой части системы:
K1=20; K2=20; T1=0,014 c; T2=0,005 c; T3=0,00125 c;
Решение 1. Строим ЛАХ неизменяемой части системы при К∑=1 (рис. 12). Частоты сопряжения определяются по формулам:
ЛАХ
неизменяемой части Lн(![]() ) поднимает на 20lg20*20=52 дБ,
получаем ЛАХ исходной нескорректированной системы.
) поднимает на 20lg20*20=52 дБ,
получаем ЛАХ исходной нескорректированной системы.
2. Строим запретную область для желаемой ЛАХ
Координаты контрольной точки равны:
3. Для построения среднечастотной зоны Lж определим, используя номограмму ( рис. 1 ), частоту среза:
Через точку ωcp= 22 с-1 проводим прямую с наклоном - 20 дБ/ дек.
4. Определим требуемые запасы по модулю и по фазе с помощью номограммы (рис. 3):
![]()
![]()
Прямые ![]() определяют протяженность среднечастотной зоны желаемой
ЛАХ. Сопряжения низкочастотной зоны осуществляют с наклоном – 40дБ/дек таким
образом, чтобы контрольная точка А находилась ниже Lж .
определяют протяженность среднечастотной зоны желаемой
ЛАХ. Сопряжения низкочастотной зоны осуществляют с наклоном – 40дБ/дек таким
образом, чтобы контрольная точка А находилась ниже Lж .
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.