












Министерство образования РФ
СПбГЭТУ “ЛЭТИ”
Кафедра РАПС
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К КУРСОВОМУ ПРОЕКТУ ПО ДИСЦИПЛИНЕ
“ РОБОТОТЕХНИЧЕСКИЕ СИСТЕМЫ И СИСТЕМЫ ПРОГРАММНОГО УПРАВЛЕНИЯ”
Выполнил : Туркин Д. Н.
Группа : 0432
Преподаватель : Омельченко А.Ю.
Санкт-Петербург
2004 г.
Содержание
Стр.
Цель курсового проекта
Описание механизма
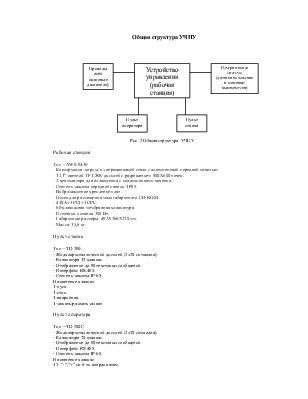
Общая структура УЧПУ
Архитектура устройства управления
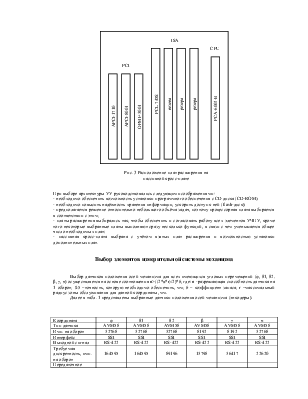
Выбор элементов измерительной системы механизма
Выбор операционной системы УЧПУ
Расчёт программной траектории исполнительного механизма
Расчёт задачи преобразования координат исполнительного механизма
Расчёт влияния массы переносимого груза на инерцию 1-й оси механизма
Программа решения прямой кинематической задачи
Заключение
Список использованной литературы
Цель курсового проекта
Цель курсового проекта – спроектировать систему числового программного управления механизмом путём выбора её отдельных блоков, аппаратно-программных компонентов, расчёта прикладных задач.
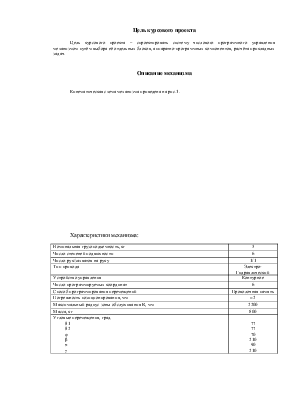
Описание механизма
Кинематическая схема механизма приведена на рис.1.
Характеристики механизма:
|
Номинальная грузоподъемность, кг |
3 |
|
Число степеней подвижности |
6 |
|
Число рук/захватов на руку |
1/1 |
|
Тип привода |
Электро-Гидравлический |
|
Устройство управления |
Контурное |
|
Число программируемых координат |
6 |
|
Способ программирования перемещений |
Проволочная память |
|
Погрешность позиционирования, мм |
±2 |
|
Максимальный радиус зоны обслуживания R, мм |
2200 |
|
Масса, кг |
800 |
|
Угловые перемещения, град. θ1 θ2 φ β α γ |
77 77 70 210 90 210 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.