Навигационные изолинии горизонтальных углов принимают за плоские окружности, вмещающие соответствен по измеренные углы a и b, проходящие через ориентиры А, В и С (рис. 3.16), в точке пересечения К определяют обсервованное место корабля.
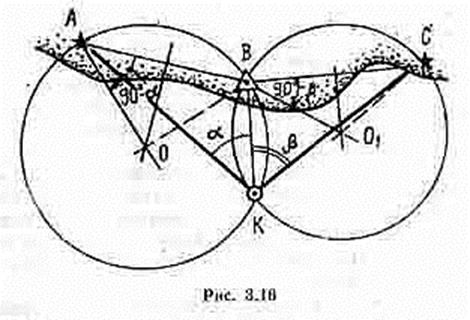
Получение обсервованного места корабля на карте может быть выполнено следующими способами:
- проведением на карте навигационных изолиний;
- построением измеренных углов с помощью кальки или протрактора.
Способ определения по двум горизонтальным углам автономен, то есть не требует использования компаса.
3.7.5 Определение места корабля по расстояниям
Известно, что измеренному расстоянию до какого-либо ориентира соответствует изолиния-окружность радиусом, равным этому расстоянию, и с центром в точке расположения ориентира. Изолинии расстояний, измеренных с корабля до двух или трех ориентиров, в точке их пересечения К (рис. 3.17) определяют обсервованное место корабля.
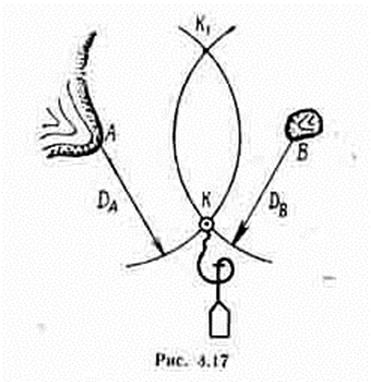
Для получения обсервованного места корабля достаточно одновременно измерить расстояния до двух ориентиров. При этом изолинии пересекутся в двух точках К и К1. Вопрос о том, какую из них следует считать обсервованным местом, легко решается путем сопоставления со счислимым местом.
Измерение трех расстояний для определения места однозначно указывает обсервацию, повышает ее точность, а главное, дает возможность обнаружить промахи и погрешности измерений.
Точность обсервованного места зависит главным образом от точности измерения расстояний, а следовательно, и от применяемого средства измерения.
На кораблях ВМФ основными средствами измерения расстояний до различных объектов являются радиолокационные станции, оптические дальномеры.
Определение места по расстояниям, измеренным до подводных естественных и искусственных объектов, может быть осуществлено с помощью корабельных гидроакустических средств.
3.7.6 Определение места корабля по разнородным навигационным параметрам
Навигационные параметры разного наименования называются разнородными.
Для определения места по разнородным навигационным параметрам наиболее часто применяется способ обсервации по пеленгу и расстоянию до ориентира.
Результаты измерений исправляются поправками и прокладываются на карте (рис. 3.18). Точка К будет обсервованным местом корабля на момент измерений.
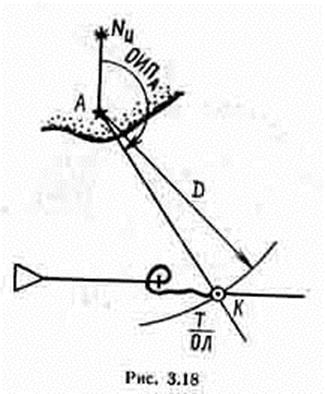
Выполнение данного способа требует тщательности измерений и контроля. Он, как и всякий иной способ, основанный на измерении двух навигационных параметров, не дает возможности выявить промахи в опознании ориентира и измерениях.
Применение комбинированной сетки пеленгов и расстояний для оперативного получения места на карте позволяет широко использовать этот способ при плавании в узкостях и выходе в назначенную точку якорной стоянки.
В некоторых случаях для определения места могут измеряться разнородные навигационные параметры в таких комбинациях: пеленг и горизонтальный угол, горизонтальный угол и расстояние, пеленг и изобата (отличительная глубина).
Круговой радиомаяк (КРМ) или радиомаяк кругового излучения-это радиопередающее устройство с антенной, излучающей радиоволны по всему горизонту. Для улучшения условий использования круговых радиомаяков в пределах ограниченного района морского театра их объединяют в группы от двух до шести. Входящие в одну группу радиомаяки работают поочередно, по строго определенной программе на одной несущей частоте. Дальность действия отечественных круговых радиомаяков-75-100 миль.
Разновременность работы радиомаяков приводит к тому, что радиопеленги измеряются с интервалами от 2 до 10 мин. Поэтому для получения обсервации линии радиопеленгов приводят обычно к моменту измерения последнего радиопеленга (рис. 3.19).
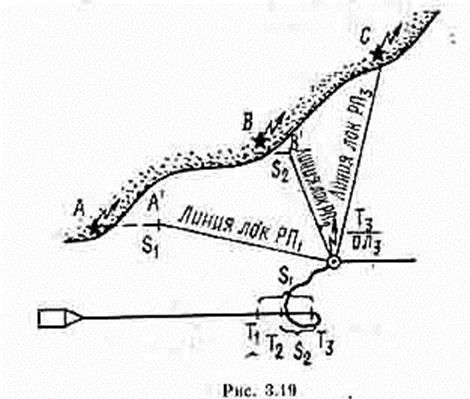
С помощью радиопеленгатора определяются ортодромические направления на радиомаяк. На карте же прямая, проходящая через радиомаяк и место корабля, изображается локсодромией. Поэтому возникает необходимость перехода от ортодромических направлений к локсодромическим. Направление локсодромического радиопеленга вычисляется по формулам:
- при измерении ОРКУ (отсчета радиокурсового угла)
Лок П = ОРКУ + КК + DГК + f + y;
- при измерении ОРП (отсчета радиопеленга)
Лок П = ОРП + DГК + f + y,
где Лок П - локсодромический пеленг; f - радиодевиация, выбираемая из таблиц; y - ортодромическая поправка.
По отсчетам лага или моментам по часам рассчитывается плавание корабля между измерениями последнего и каждого из предыдущих радиопеленгов S1, S2. На путевой карте рассчитываются смещенные точки радиомаяков А', В' из которых проводятся обратные локсодромические пеленги. Точка их пересечения оформляется как обсервованное место на момент последнего измерения.
3.9.1 Фазовые радионавигационные системы
В последние годы широкое использование в кораблевождении получили фазовые радионавигационные системы (РНС) различного назначения. Возможность определения места в минимальные сроки с высокой точностью обусловили их интенсивное развитие.
Фазовые РНС можно подразделить на системы дальней, средней и ближней навигации.
1. Фазовые РНС дальней навигации обеспечивают определение места корабля в открытом море и в океане. Примером такой системы может служить фазовая РНС "Омега", работающая на СДВ, l = 22÷30 км (f = 10÷14 кГц). Эти радиоволны проходят большое расстояние (до 8000-10000 км). Кроме того, они обладают свойством проникать под воду на глубины 10-30 м. Равномерное расположение станций на различных материках и островах обеспечивает возможность приема их сигналов в любой точке земного шара. Точность определения места в зависимости от времени суток составляет 1-2 мили.
2. Фазовые РНС средней дальности обеспечивают навигационную безопасность плавания и координирование гидрографических и тральных работ в морях и прибрежных частях океанов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.