Надежность определения места во многом обеспечивается правильным опознанием ориентиров. Это опознание осуществляется сличением их характеристик с данными, приводимыми в соответствующих пособиях. Ориентиры, опознание которых не может быть уверенным, не должны использоваться для обсервации.
3.7.1 Определение места корабля по двум компасным пеленгам
При наличии в пределах видимости с корабля двух береговых ориентиров наиболее простым способом определения места является обсервация по двум пеленгам, одновременно измеренным с помощью пеленгатора на эти ориентиры.
Измеренные компасные пеленги после исправления поправкой компаса прокладываются на карте. В точке их пересечения определяется обсервованное место корабля (рис. 3.13).
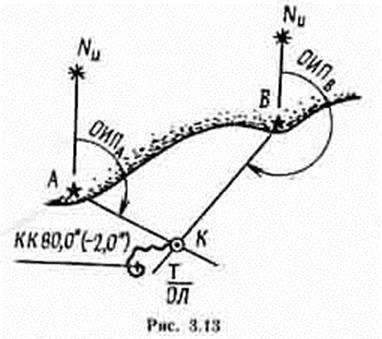
Изолиниями при пеленговании видимых ориентиров являются линии истинных пеленгов (в нашем случае линии АК и ВК).
Считая наблюдателя находящимся в любой из точек этих линий, можно утверждать, что при одновременном пеленговании ориентиров А и В его место будет располагаться в общей точке изолиний, то есть в точке их пересечения К.
При всей очевидной простоте способа, универсальности его применения, он обладает весьма существенным недостатком - при ошибке в опознании одного из. ориентиров или промахе пеленга ошибка пол ученного места обнаружена быть не может.
Погрешность в принятой поправке компаса значительно снижает точность определения места и также обнаружена быть не может. Поэтому способ определения места по пеленгам двух ориентиров следует применять на практике лишь в тех случаях, когда в расположении наблюдателя имеется всего два ориентира.
3.7.2 Определение места корабля по трем компасным пеленгам
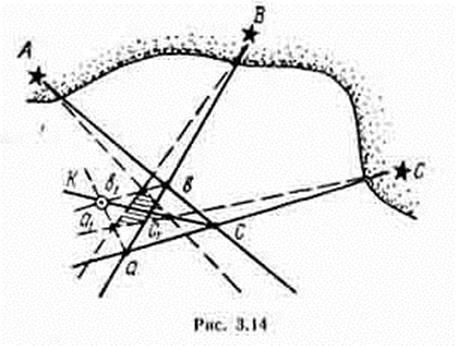
По своей сущности способ определения места корабля по трем пеленгам аналогичен способу определения места по двум пеленгам. Точность обсервации при этом повышается взятием пеленга на третий ориентир. Пеленгование начинается с ориентиров, наблюдаемых на носовых или кормовых курсовых углах, затем измеряется пеленг на ориентир, расположенный вблизи траверзных направлений (рис. 3.14).
Теоретически для определения места пеленги на ориентиры должны браться одновременно. В реальных условиях измерение навигационных параметров производится с интервалом во времени, то есть из разных точек линии пути. Следовательно, погрешность возрастает с увеличением скорости корабля и промежутка времени между пеленгами, поэтому измерения должны производиться в наиболее быстрой последовательности.
При отсутствии промахов и систематических погрешностей измерения линии пеленгов пересекаются на карте практически в одной точке.
Если при пересечении линий пеленгов образуется треугольник, называемый треугольником погрешностей, необходимо проанализировать причины его возникновения. Если треугольник погрешностей мал (любая из его сторон не превышает 0,5 мили), место корабля принимается в его центре. Если треугольник погрешностей велик, следует измерение и обработку компасных пеленгов повторить. Если вновь проложенные на карте пеленги образуют треугольник погрешностей, сохранивший размеры и конфигурацию первоначального, следует считать, что причина его появления вызвана погрешностью поправки компаса. В этом случае следует изменить принятую поправку компаса на 2-5° в любую сторону и, обработав ею компасные пеленги, вновь проложить их па карте, а вершины полученного нового треугольника а1, b1, с1 соединить со сходственными вершинами треугольника аbс прямыми линиями (рис. 3.14). Точка пересечения этих прямых К определяет вероятнейшее место корабля, свободное от погрешности поправки компаса. Измерив на карте истинный пеленг ИПA, ИПB и ИПC из полученной точки К на ориентиры и вычислив разность с соответствующими компасными пеленгами, получим значения поправок компаса:
DК1 = ИПА - КПА;
DК2 = ИПВ - КПВ;
DК3 = ИПС - КПС.
Наиболее точное значение поправки компаса вычисляется как средние арифметическое:
DК = (1 / 3)( DК1 + DК2 + DК3).
В практике кораблевождения этот способ называют "разгоном" треугольника погрешностей.
3.7.3 Определение места корабля способом крюйс- пеленга
Нередко в практике кораблевождения в видимости с корабля находится только один ориентир. В этих условиях для определения места применяются так называемые крюйс-способы, сущность которых состоит н том, что измерение навигационных параметров производится в разные моменты времени с интервалом, в течение которого существенно измен и те я направление на ориентир. Дважды измерив пеленги с перемещающегося корабля на ориентир А (рис. 3.15) и проложив на карте линии пеленгов лп1 и лп2 можно утверждать, что корабль в моменты измерении находится где-то на этих линиях.
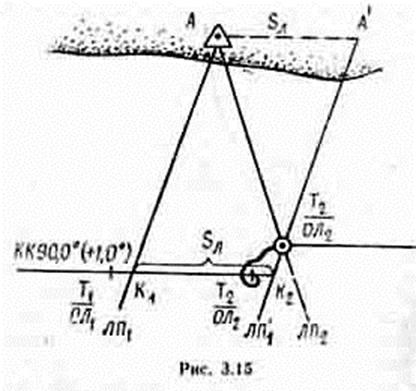
При отсутствии ошибок счисления место корабля на линиях пеленгов будет в точках их пересечения с линией курса К1 и К2.
При наличии ошибок счисления место корабля может быть найдено путем вмещения вектора плавания Sл между линиями пеленгов. Суть вмещения - в приведении лп1 к моменту лп2.
Как видно из рис. 3.15, вектор плавания Sл может быть проведен от любой точки линии лп1, в том числе и от места ориентира A.
Расчет перемещения производится по формулам:
Sл = (ол2 - ол1) Кл ;
Sл = (T2 - T1) Vл.
Так как при определении места используются элементы движения корабля, место называется счислимо-обсервованным.
Существенным недостатком этого способа является недостаточная точность из-за ошибок в элементах счисления и малых углах пересечения линий положения на больших удалениях корабля от ориентира.
3.7.4 Определение места корабля по горизонтальным углам
Определение места корабля по двум одновременно измеренным горизонтальным углам между направлениями на три ориентира является одним из наиболее точных навигационных способов.
Измерение горизонтальных углов производится с помощью высокоточного угломерного инструмента - навигационного секстана.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.