










Содержанием дисциплины "Тактическое маневрирование" является изучение относительного перемещения маневрирующих кораблей для занятия выгодного положения относительно объекта маневра.
Из двух маневрирующих кораблей объектом маневра принято считать тот из них, относительно которого определяются последующие положения другого корабля. Объект маневра обозначается буквой К.
Корабль, положение которого определяется либо изменяется относительно объекта маневра, называется маневрирующим и обозначается буквой М.
Знание взаимного положения маневрирующих кораблей на любой момент времени позволяет правильно оценить обстановку, осуществить обоснованное, рассчитанное маневрирование при применении оружия или уклонении от встречи с противником, рационально выполнить маневрирование при совместном плавании, обеспечить безопасное расхождение и т. д.
Маневрирование корабля относительно неподвижного объекта маневра называется односторонним, а относительно движущегося объекта маневра -двусторонним. Если взаимосвязанное маневрирование осуществляют три корабля и более, такое маневрирование называется многосторонним.
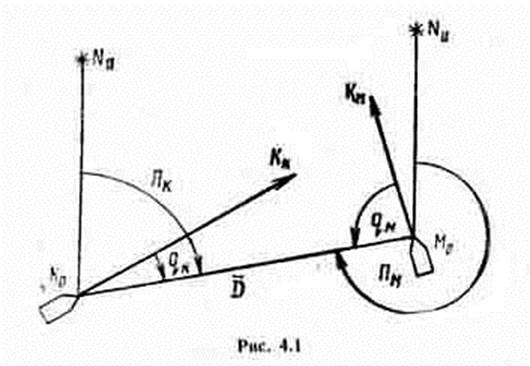
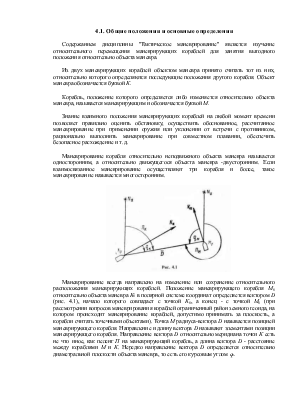
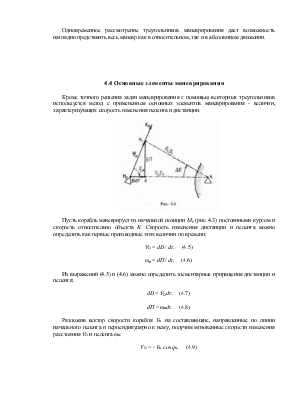
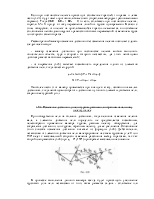
Маневрирование всегда направлено на изменение или сохранение относительного расположения маневрирующих кораблей. Положение маневрирующего корабля М0 относительно объекта маневра К0 в полярной системе координат определяется вектором D (рис. 4.1), начало которого совпадает с точкой К0, а конец - с точкой М0 (при рассмотрении вопросов маневрирования кораблей ограниченный район земного геоида, на котором происходит маневрирование кораблей, допустимо принимать за плоскость, а корабли считать точечными объектами). Точка М радиуса-вектора D называется позицией маневрирующего корабля. Направление и длину вектора D называют элементами позиции маневрирующего корабля. Направление вектора D относительно меридиана точки К есть не что иное, как пеленг П на маневрирующий корабль, а длина вектора D - расстояние между кораблями М и К. Нередко направление вектора D определяется относительно диаметральной плоскости объекта маневра, то есть его курсовым углом qк.
Таким образом, к элементам позиции маневрирующего корабля относятся: пеленг на маневрирующий корабль П или курсовой угол qк и дистанция D. Так как при маневрировании используются только истинные пеленги и курсы, они обозначаются П, К, а не ИП, ИК, как в навигации.
Основными методами, применяемыми для изучения закономерностей, свойственных изменению элементов позиции маневрирующего корабля в ходе маневра, а также при практическом решении задач маневрирования, являются:
- метод относительного движения;
- метод, основанный на использовании основных элементов маневрирования.
При двустороннем маневрировании установление законов изменения элементов позиции затруднено вследствие одновременного перемещения маневрирующих кораблей. Поэтому в тактическом маневрировании применяют метод относительного движения. Метод относительного движения заключается в замене двустороннего маневрирования как бы односторонним, при котором движение маневрирующего корабля рассматривается относительно условно неподвижного объекта маневра.
Относительным движением называется движение тела по отношению к подвижной системе координат. Движение самой подвижной системы координат относительно неподвижной системы координат называется переносным, а движение тела относительно системы координат, условно принятой за неподвижную, называется абсолютным движением.
Абсолютное, переносное и относительное движение связаны между собой геометрическим соотношением
Vабс = Voтн + Vпер. (4.1)
При двустороннем маневрировании за начало подвижной системы координат принимается объект маневра. Тогда его собственное движение по отношению к поверхности Земли будет переносным, движение маневрирующего корабля по отношению к поверхности Земли будет абсолютным, а по отношению к объекту маневра - относительным.
Для дальнейших рассуждений введем следующие обозначения:
М, Км, Vм, Sм, qм - соответственно позиция, курс, скорость, перемещение, курсовой угол маневрирующего корабля в абсолютном движении;
М', Кr, Vr, Sr, qr - те же элементы в относительном движении;
К, Kк, Vк, Sк, qк - позиция, курс, скорость, перемещение, курсовой угол объекта маневра;
П, D, t, Т - соответственно истинный пеленг, дистанция, промежуток времени, момент по часам.
С учетом принятых обозначений формула (4.1) будет иметь вид:
Vм = Vк + Vr. (4.2)
Так как перемещения кораблей пропорциональны скоростям, можно записать:
Sм = Sк + Sr (4.3)
откуда
Sr = Sм - Sк. (4.4)
Таким образом, чтобы перейти к относительному движению, необходимо из абсолютного движения исключить переносное.
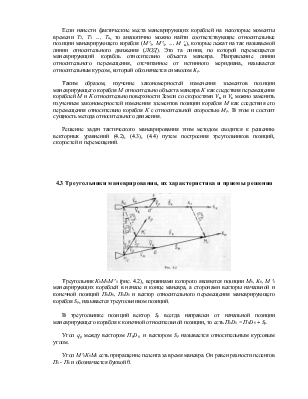
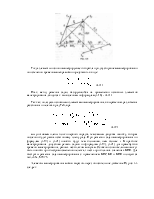
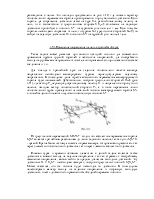
Пусть корабли М и К, находящиеся в начальный момент в точках М0 и К0 (рис. 4.2), следуют соответствующими курсами Kм и Kк и скоростями Vм и Vк.
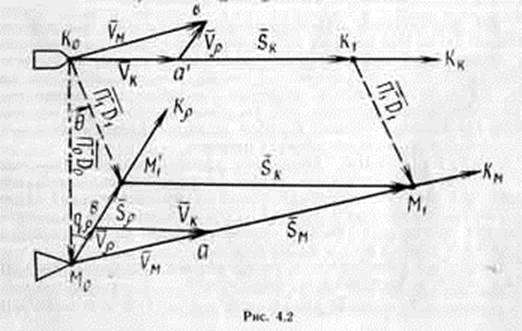
Начальная позиция маневрирующего корабля определяется пеленгом П0 и дистанцией D0.
Через некоторый промежуток времени t корабль М, пройдя расстояние Sм = Vмt переместится в точку М1 а корабль К - в точку К1, пройдя расстояние Sк = Vкt при этом новая позиция М1 маневрирующего корабля будет определяться вектором П1D1, то есть пеленгом П1 и дистанцией D1.
Чтобы определить относительную позицию М'1 на момент времени Т1 = Т0 + t, надо, как это следует из формулы (4.4), из вектора Sм геометрически вычесть вектор Sк, тогда вектор M0M '1 будет вектором относительного перемещения Sr, а М '1 - относительной позицией маневрирующего корабля на момент времени T1 и взаимное расположение кораблей для точки М1 будет точно таким же, как и для точки М '1, так как векторы K1M1 и K0M '1 равны и параллельны. Это вытекает из того, что К0К1М1М '1 - параллелограмм (по построению).
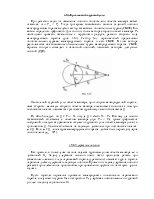
Если нанести фактические места маневрирующих кораблей на некоторые моменты времени T2, Т3 ..., Тn, то аналогично можно найти соответствующие относительные позиции маневрирующего корабля (М '2, М '3, ..., M 'n), которые лежат на так называемой линии относительного движения (ЛОД). Это та линия, по которой перемещается маневрирующий корабль относительно объекта маневра. Направление линии относительного перемещения, отсчитанное от истинного меридиана, называется относительным курсом, который обозначается символом Kr.
Таким образом, изучение закономерностей изменения элементов позиции маневрирующего корабля М относительно объекта маневра К как следствия перемещения кораблей М и К относительно поверхности Земли со скоростями Vм и Vк можно заменить изучением закономерностей изменения элементов позиции корабля М как следствия его перемещения относительно корабля К с относительной скоростью Mr. В этом и состоит сущность метода относительного движения.
Решение задач тактического маневрирования этим методом сводится к решению векторных уравнений (4.2), (4.3), (4.4) путем построения треугольников позиций, скоростей и перемещений.
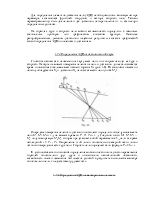
Треугольник К0М0М '1 (рис. 4.2), вершинами которого являются позиции М0, K0, М '1 маневрирующих кораблей в начале и конце маневра, а сторонами векторы начальной и конечной позиций П0D0, П1D1 и вектор относительного перемещения маневрирующего корабля Sr, называется треугольником позиций.
В треугольнике позиций вектор Sr всегда направлен от начальной позиции маневрирующего корабля к конечной относительной позиции, то есть П1D1 = П0D0 + Sr.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.