Под корабельными техническими средствами навигации (ТСН) понимаются навигационные комплексы или совокупность корабельной навигационной аппаратуры, предназначенные для выработки навигационных параметров. Навигационные параметры представляют собой совокупность величин, характеризующих место и перемещение судна в заданной системе координат. К таким величинам относят курс, скорость, углы качки корабля, его координаты, глубину под килем, пеленг на ориентир и т. п.
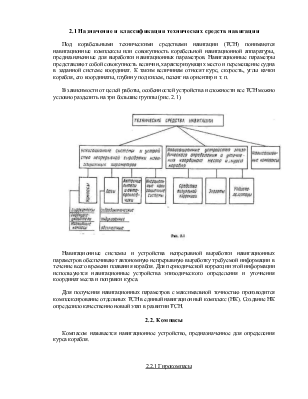
В зависимости от целей работы, особенностей устройства и сложности все ТСН можно условно разделить на три большие группы (рис. 2.1).
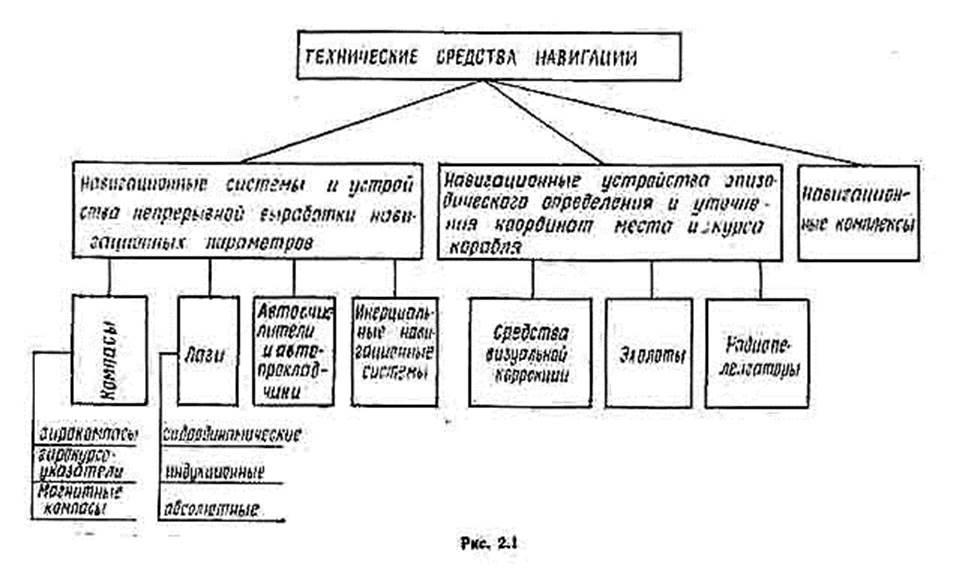
Навигационные системы и устройства непрерывной выработки навигационных параметров обеспечивают автономную непрерывную выработку требуемой информации в течение всего времени плавания корабля. Для периодической коррекции этой информации используются навигационные устройства эпизодического определения и уточнения координат места и поправки курса.
Для получения навигационных параметров с максимальной точностью производится комплексирование отдельных ТСН в единый навигационный комплекс (НК). Создание НК определило качественно новый этап в развитии ТСН.
Компасом называется навигационное устройство, предназначенное для определения курса корабля.
2.2.1 Гирокомпасы
Гирокомпасом называется навигационное устройство с гироскопическим чувствительным элементом, предназначенное для определения курса корабля.
Принцип действия гирокомпасов основан на использовании свойств гироскопа, гравитационного поля Земли и ее суточного вращения вокруг своей оси.
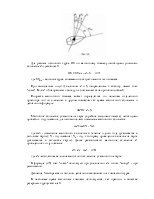
Гироскоп (рис. 2.2) представляет собой быстровращающееся твердое тело, имеющее ось симметрии ОХ и подвешенное в неподвижной относительно его основания точке О, лежащей на оси ОХ.
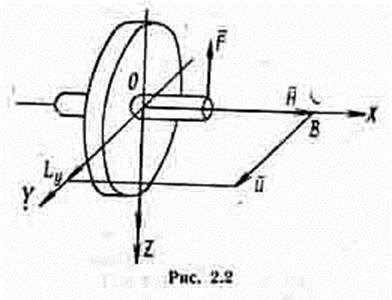
Неподвижная точка О называется точкой подвеса гироскопа. Если центр масс гироскопа совпадает с точкой подвеса О, то он называется астатическим. Астатический гироскоп, на который не действуют моменты внешних сил, является свободным гироскопом.
Динамические свойства гироскопа определяются его параметрами, основными из которых являются угловая скорость W, момент инерции J и кинетический момент H = JW.
Величина H влияет на проявление свойств гироскопа. Первое свойство - устойчивость положения главной оси свободного гироскопа относительно инерциального пространства (инерциальной системы координат). Под инерциальной системой координат понимается система координат, ориентированная неподвижно относительно звезд.
С использованием теоремы об изменении количества движения твердого тела это свойство записывается в виде
dH / dt = L = 0. (2.1)
Выражение (2.1) показывает, что производная от вектора кинетического момента, взятого относительно некоторой точки, равна вектору момента действующих на гироскоп внешних сил L, взятого относительно той же точки.
Свободный гироскоп, находящийся на поверхности Земли, вследствие ее суточного вращения будет видимым образом изменять положение своей главной оси относительно предметов, связанных с Землей.
Второе свойство - под воздействием постоянного или медленно меняющегося момента внешних сил L свободный гироскоп совершает прецессионное движение.
При воздействии на гироскоп силы F (рис. 2.2) момент внешней силы Ly будет направлен по оси ОY. Главная ось гироскопа начнет прецессионное движение в плоскости YОХ в направлении момента Ly с линейной скоростью
u = OBr = Hr, (2.2)
где r - угловая скорость вращения оси ОХ в инерциальном пространстве вокруг оси 0Z.
Известно, что производная по времени от вектора равна скорости конца вектора:
u = Ly. (2.3)
Следовательно, скорость u конца вектора Н свободного гироскопа относительно точки подвеса геометрически равна моменту внешних сил Ly, взятому относительно той же точки О.
С учетом (2.2) и (2.3) можно записать:
Ly = Hr; r = Ly / H. (2.4)
Равенства (2.4) выражают закон прецессии.
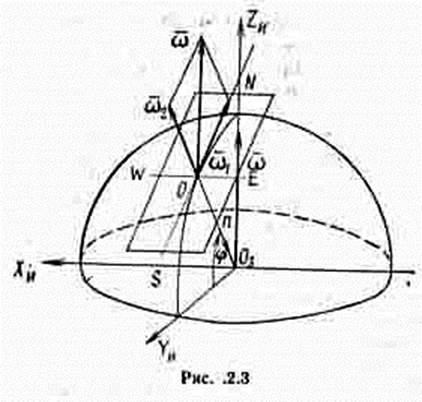
При исследовании поведения гироскопических устройств представляет интерес рассмотрение их движения не только в инерциальном пространстве, но главным образом по отношению к системам координат, определенным образом связанных с Землей. Одной из таких систем является горизонтальная система координат (ГСК) с географической ориентацией осей (рис. 2.3), имеющая начало в точке О подвеса гироскопа. Предположим, что Земля имеет форму шара радиусом R. Обозначим данную систему координат ОNEn, ее ось ON направим вдоль истинного меридиана к северу, ось ОЕ - вдоль параллели к востоку и Оn - вдоль истинной вертикали вниз (в надир). На рис. 2.3 обозначены также ОзХиУиZи - инерциальная система координат, j - географическая широта точки О.
Из теории гироскопических устройств известно, что угловая скорость вращения Земли в инерциальном пространстве равна угловой скорости w ее суточного вращения вокруг своей оси.
Перенесем вектор w из центра Земли Оз в точку О и разложим на составляющие по осям 0N и Оn, Из рис. 2.3 видно, что
w1 = w cos j; w2 = w sin j. (2.5)
С угловой скоростью w1 в точке О вращается в инерциальном пространстве вокруг оси ON плоскость истинного горизонта так, что восточная ее часть опускается, а западная - поднимается. С угловой скоростью w2 в точке О вращается в инерциальном пространстве вокруг оси Оn плоскость истинного меридиана так, что северная ее часть (в северном полушарии) перемещается к западу, а южная - к востоку.
Из выражения (2.5) видно, что на экваторе w1 = w и w2 = 0, а на полюсе w1 = 0 и w2 = w.
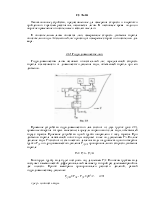
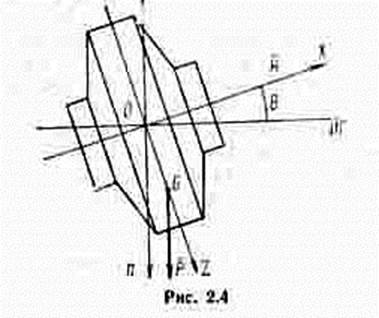
В гирокомпасе вращение Земли создает направляющий момент, удерживающий главную ось гироскопа в плоскости географического меридиана. Простейший способ создания направляющего (маятникового) момента заключается в смещении центра масс гироскопа (не ротора) вдоль его оси OZ (рис. 2.4). Если центр масс гироскопа смещен в точку G, то при отклонении главной оси гироскопа ОХ от плоскости истинного горизонта (ИГ) на угол q за счет гравитационного поля Земли создается маятниковый момент Ly, направленный за плоскость чертежа:
Ly = - РОG sin q (2.6)
где Р - сила тяжести гироскопа.
Из (2.6) видно, что при увеличении угла q возрастает момент Ly.
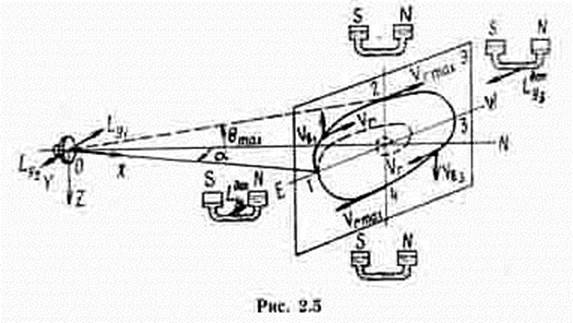
Рассмотрим поведение свободного гироскопа со смещенным центром масс, находящегося на неподвижном относительно Земли основании на экваторе (рис. 2.5). Допустим, что в начальный момент времени главная ось гироскопа ОХ находится в плоскости истинного горизонта и отклонена от истинного меридиана к востоку на угол a (точка 1 на экране Э). Вследствие опускания восточной части плоскости горизонта главная ось гироскопа начнет видимым образом подниматься с линейной скоростью VB1. Это приведет к образованию и увеличению угла q. За счет смещения центра масс гироскопа с появлением угла q возникает маятниковый момент Ly, направленный к западу. Главная ось гироскопа начнет прецессировать к плоскости меридиана. До тех пор, пока ось ОХ не пересечет плоскость меридиана, угол q продолжает увеличиваться. Это приводит к дальнейшему увеличению момента Ly и горизонтальной скорости прецессии Vr. Главная ось гироскопа оставит на экране Э след от точки 1 до точки 2. В момент пересечения плоскости меридиана q = qmax, Ly1 = Ly1max и горизонтальная скорость прецессии максимальна, Vr = Vr max. Главная ось гироскопа со скоростью Vr max пересекает плоскость меридиана и переходит в западную часть. Вследствие подъема западной части плоскости горизонта ось ОХ гироскопа начнет видимым образом опускаться. Это приведет к уменьшению угла q, момента Ly и горизонтальной скорости прецессии Vr.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.