Магнитным компасом называют навигационное устройство с магнитным чувствительным элементом, предназначенное для определения курса корабля.
Принцип действия магнитного компаса основан на использовании магнитного поля Земли. Известно, что Земля представляет собой магнит, северный и южный полюса которого не совпадают с соответствующими географическими полюсами. Вследствие этого магнитный меридиан ОNM составляет с истинным меридианом ОN в заданной точке угол, называемый магнитным склонением d (рис. 2.8). Намагниченная и свободно вращающаяся вокруг вертикальной оси стрелка, внесенная в магнитное поле Земли, устанавливается по направлению магнитного меридиана. Однако влияние магнитного поля корабля приводит к отклонению стрелки от магнитного меридиана на угол d, называемый девиацией магнитного компаса.
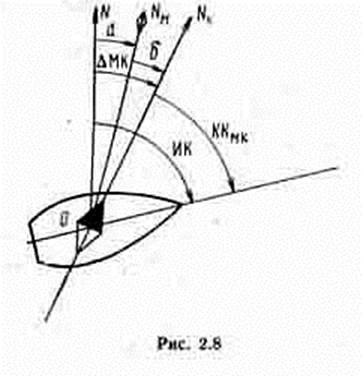
Для расчета истинного курса ИК по магнитному компасу необходимо учитывать склонение d и девиацию d:
ИК = ККMK + d + d, (2.7)
где ККMK - величина курса, снимаемого с катушки магнитного компаса.
При вычислениях по (2.7) величины d и d, направленные к востоку, имеют знак "плюс". Если d и d направлены к западу, их знак меняется на противоположный.
Поправка магнитного компаса может определяться по пеленгам отдаленного ориентира или по сличению с другим компасом как сумма магнитного склонения и девиации по формуле
DMK = d + d.
Магнитное склонение, указанное на карте (в районе счислимого места), необходимо привести к году плавания, для чего вычисляют изменение магнитного склонения:
Dd = Dd1(N - NK),
где Dd1 - изменение магнитного склонения в течение одного года (указывается в заголовке карты); N - год плавания; NK - год, к которому приведено склонение на карте (указывается в заголовке карты). Далее рассчитывают магнитное склонение d, приведенное к году плавания:
d = |dK| ± Dd, (2.8)
где |dK| -абсолютная величина магнитного склонения, указанного на карте.
В формуле (2.8) знак "плюс" используют при увеличении |dK| и знак "минус" - при уменьшении.
Девиация d выбирается из таблицы девиации в зависимости от компасного курса.
В настоящее время магнитные компасы используются, как правило, в качестве резервных курсоуказателей.
Навигационное устройство, предназначенное для измерения скорости и выработки пройденного кораблем расстояния, называется лагом. В настоящее время получили широкое применение относительные и абсолютные лаги.
К относительным лагам относятся лаги, измеряющие скорость движения корабля относительно воды. Абсолютный лаг производит измерение скорости относительно дна моря.
2.3.1 Гидродинамические лаги
Гидродинамическим лагом называют относительный лаг, определяющий скорость корабля в зависимости от динамического давления воды, обтекающей корабль при его движении.
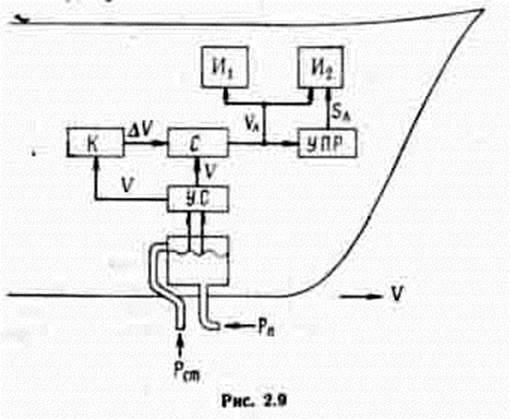
Приемное устройство гидродинамического лага состоит из двух трубок (рис. 2.9), приемные отверстия которых вынесены за пределы пограничного слоя воды, обтекающей корпус корабля. Приемное устройство одной трубки направлено к носу корабля. При движении корабля набегающий поток воды поступает в нее под давлением РП. Полное давление воды РП состоит из статического давления воды на уровне входного отверстия трубки РСТ и гидродинамического давления РДИН, пропорционального скорости движения корабля:
РП = РСТ + РДИН.
Во вторую трубку вода будет поступать под давлением РСТ. По обеим трубкам вода поступает в механический дифференциальный манометр, который разделен мембраной на две полости. Прогиб мембраны пропорционален разности давлений, равной гидродинамическому давлению:
РДИН = РПТ - РСТ = rV2/2, (2.9)
где r - плотность воды.
Из (2.9) видно, что прогиб мембраны пропорционален скорости движения корабля:
![]() . (2.10)
. (2.10)
Механическое усилие мембраны через шток подается в узел скорости УС, где реализуется зависимость (2.10). Полученное значение скорости V подается на корректор К, в котором вырабатывается поправка DV. Поправка DV складывается в сумматоре С с величиной V, и суммарное значение относительной скорости Vл поступает на индикаторы скорости И1, И2 и в узел пройденного расстояния УПР. В УПР решается задача вычисления пройденного кораблем расстояния за время t:
Полученное значение поступает на индикатор скорости и пройденного расстояния И2.
Расстояние, пройденное кораблем, определяется как разность между двумя последовательными отсчетами лага ол1 и ол2, снятыми с индикатора И2:
рол = ол2 - ол1.
Из-за погрешности в показаниях лага разность отсчетов лага (рол) не соответствует истинному расстоянию, проходимому кораблем относительно воды. Поэтому расстояние, измеренное относительным лагом, необходимо исправлять поправкой лага. Поправку лага выражают в процентах по отношению к пройденному расстоянию:
 (2.11)
(2.11)
где SИ - истинное расстояние, проходимое кораблем относительно воды (мили); VИ - истинная скорость корабля относительно воды; VЛ - скорость корабля по показаниям лага (уз).
Таким образом, из выражения (2.11) получим:
 (2.12)
(2.12)
Для исправления показаний относительных лагов целесообразно использовать коэффициент лага (кЛ):
кЛ =1 +(Dл/100). (2.1З)
Подставив (2.13) в выражение (2.12), получим
SИ = рол * кЛ. (2.14)
2.3.2 Индукционные лаги
Индукционным лагом называют относительный лаг, определяющий скорость корабля в зависимости от электродвижущей силы (ЭДС), индуцируемой в потоке воды, обтекающем корабль при его движении.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.