В момент пересечения главной осью ОХ плоскости горизонта (точка 3 на экране Э) q = 0, Ly = 0, Vr = 0, VB = VB3.
Пройдя точку 3, главная ось гироскопа будет опускаться под плоскость горизонта, что приведет к образованию отрицательного угла -q. С образованием -q возникает маятниковый момент Ly2, направленный к востоку. До пересечения главной осью гироскопа плоскости меридиана (точка 4 на экране Э) продолжается увеличение угла -q, момента Ly2 и линейной скорости прецессии гироскопа к меридиану Vr.
В момент пересечения главной осью гироскопа плоскости меридиана (точка 4 на экране Э) угол - q = - qmax, момент Ly2 = Ly2 max, скорость прецессии к меридиану максимальна, Vr = Vr max.
Далее главная ось гироскопа переходит в восточную часть. Вследствие опускания восточной части плоскости горизонта происходит уменьшение угла -q по абсолютной величине, момента Ly2 и линейной скорости прецессии Vr. В дальнейшем главная ось ОХ подойдет к своему первоначальному положению (точка 1 на экране Э).
Таким образом, главная ось гироскопа будет совершать незатухающие колебания относительно плоскости истинного меридиана. Для того чтобы колебания сделать затухающими, применяют специальный масляный успокоитель (демпфер). Он представляет собой систему двух сообщающихся сосудов, частично заполненных маслом. Сосуды располагаются параллельно оси ОХ, один из них является северным (N), другой - южным (S).Параметры успокоителя выбирают таким образом, чтобы период колебаний уровня масла в нем был равен периоду колебаний главной оси гироскопа по углу q и отставал по фазе на 90°.
В точке 1 (рис. 2.5) за счет того, что в северном сосуде успокоителя уровень масла выше, чем в южном, успокоителем создается дополнительный демпфирующий момент Lдопy1, направленный к меридиану. В точке 2 уровень масла в обоих сосудах одинаков, Lдопy = 0. В точке 3 в южном сосуде уровень масла выше, чем в северном. За счет этого создается дополнительный момент Lдопy3, направленный к меридиану. В точке 4 уровни масла в успокоителе равны нулю и Lдопy = 0. Под влиянием дополнительных (демпфирующих) моментов колебания главной оси гироскопа становятся затухающими. На экране Э они показаны штриховой линией.
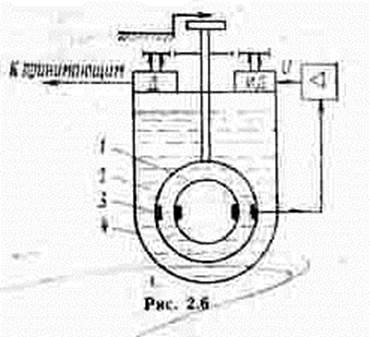
В существующих типах гирокомпасов применяется пара гироскопов. Они расположены внутри герметичной гиросферы 1 (рис. 2.6). Гиросфера погружена в поддерживающую жидкость 2. Вокруг гиросферы располагается негерметичная следящая сфера 3. Следящая сфера с помощью специального стержня подвешивается к крышке резервуара 4, наполненного поддерживающей жидкостью.
При повороте корабля следящая сфера, разворачиваясь вместе с ним, рассогласуется с гиросферой, которая удерживает направление меридиана. Сигнал рассогласования U через усилитель подается на исполнительный двигатель ИД, который разворачивает следящую сферу до согласованного с гиросферой положения. Одновременно с этим разворачивается датчик курса Д, с которого курс поступает на принимающие.
На работу чувствительного элемента оказывают влияние изменения курса, скорости корабля и качка, вызывающие погрешности в показаниях гирокомпаса. Эти погрешности периодически определяются и компенсируются вводом поправок в показания гирокомпасов.
При плавании в высоких широтах угловая скорость вращения плоскости горизонта w1 = w*СОS j становится малой, на полюсе w1 = 0. Вследствие этого угол q (рис. 2.5) достигает незначительных величин и гирокомпас в высоких широтах работает неустойчиво. Поэтому при плавании в этих широтах в качестве основных курсоуказателей используют гироазимуты. В отличие от гирокомпасов и магнитных компасов гироазимут не "приходит" в меридиан, но, будучи "приведенным" в него, сохраняет это положение.
2.2.2 Гирокурсоуказатели
Гирокурсоуказатель (ГКУ) - гироскопическое навигационное устройство, предназначенное для определения курса корабля.
Чувствительным элементом ГКУ является трехстепенной поплавковый гироблок (ТПГ), основной частью которого является герметичный сферический поплавок. Внутри поплавка расположен гироскоп. Пространство между поплавком и корпусом ТПГ заполнено специальной жидкостью. Поплавок связан с корпусом ТПГ двумя парами взаимно перпендикулярных (горизонтальных и вертикальных) торсионов. Торсионы центрируют поплавок относительно корпуса ТПГ и выполняют функцию датчиков моментов.
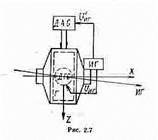
В отличие от гирокомпаса в ГКУ центр масс гироскопа не смещается. Формирование маятникового момента происходит на основании сигнала UИГ об отклонении главной оси гироскопа Х относительно плоскости истинного горизонта ИГ (рис. 2.7). Сигнал UИГ снимается с индикатора истинного горизонта ИГ. Далее сигнал UИГ подается на двигатель горизонтальной стабилизации ДГС, который разворачивает корпус ТПГ относительно гироскопа Г вокруг оси У (на рисунке не показана). Это приводит к закрутке горизонтальных торсионов и созданию маятникового момента Ly. Индикатор горизонта используется и для создания демпфирующего момента Lz. Для этого после предварительного масштабирования и усиления сигнал U'ИГ подается на двигатель азимутальной стабилизации ДАС, который разворачивает корпус ТПГ относительно гироскопа Г вокруг оси Z и закручивает, таким образом, вертикальные торсионы.
Следовательно, выработка маятникового Ly и демпфирующего Lz моментов происходит не непосредственно самим гироскопическим элементом, а косвенно, с использованием информации от индикатора горизонта. Поэтому ГКУ относят к гирокомпасам с косвенным управлением.
2.2.3 Магнитные компасы
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.