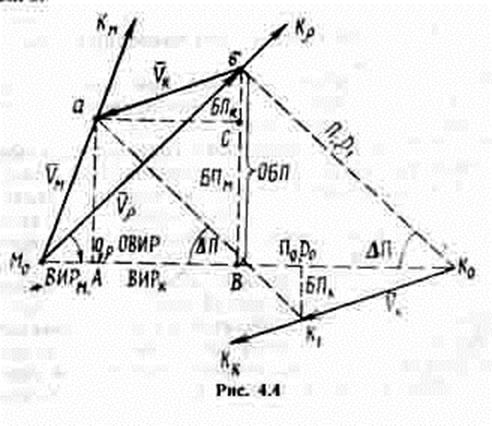
При двустороннем маневрировании скорости изменения дистанции, бокового перемещения и пеленга между кораблями определяются параметрами движения обоих кораблей. Рассуждая аналогично случаю одностороннего маневрирования, получим следующие формулы для решения задач двустороннего маневрирования (рис. 4.4):
 (4.20)
(4.20)
где ОВИР - общая величина изменения расстояния; ОБП - общая величина боксового перемещения; ВИП - величина изменения пеленга.
Тогда элементы позиции маневрирующего корабля при двустороннем маневрировании по истечении времени маневра можно представить в виде:
 (4.21)
(4.21)
Итак, метод решения задач, базирующийся на применении основных элементов маневрирования, сводится к вычислениям по формулам (4.16) - (4.21).
Так как, пользуясь основными элементами маневрирования, в выражениях разложения расстояния и пеленга в ряд Тейлора
 (4.22)
(4.22)
мы учитываем члены только первого порядка, тем самым допуская ошибку, которая численно будет равна остаточному члену ряда. При решении задач маневрирования по формулам (4.19) и (4.21) ошибки будут тем большими, чем больше t. В практике маневрирования допустимо решать задачи по формулам (4.19), (4.21) для промежутков времени маневрирования, равных нескольким минутам. Особенно значительными могут быть ошибки при быстром изменении пеленга, то есть при больших значениях ВИП. Для быстроты решения задач маневрирования с применением ВИР, БП и ВИП пользуются табл. 31а, МТ-75.
Элементы маневрирования можно выразить через относительное движение. Из рис. 4.4 следует:
 (4.23)
(4.23)
При применении оружия, а также при совместном плавании в ордерах кораблю приходится маневрировать для занятия, удержания или изменения позиции.
В быстро меняющейся обстановке современного морского боя может возникнуть необходимость в кратчайший срок изменить дистанцию, с максимальной скоростью изменить пеленг на противника или, наоборот, сохранить его, изменив дистанцию, и т. д. В каждом конкретном случае необходимо правильно выбрать прием маневрирования.
Для расчета элементов маневра применяются аналитический, табличный, приборный и графический способы.
Аналитический способ заключается в определении искомых величин по формулам. Этот способ чаще применяется при исследовательских разработках, теоретических расчетах и при составлении таблиц. Для решения задач в практике маневрирования способ широкого применения не получил, так как не дает возможности решить задачу достаточно быстро и не обладает наглядностью.
Табличный способ, когда искомые величины находят по таблицам, применяется только при решении некоторых типов задач маневрирования, универсальных таблиц для решения всех задач маневрирования пока не существует. Кроме того, этот способ не обладает достаточными точностью и наглядностью, поэтому широкого распространения на кораблях для решения задач маневрирования не получил.
Широкое применение вычислительной техники, позволяющей быстро и точно определить элементы маневрирования, способствовало тому, что приборный способ стал основным для решения задач маневрирования.
Графический способ решения задач маневрирования прост и удобен. В отличие от других способов он нагляден и позволяет легко проконтролировать все решения. Этот способ обеспечивает достаточные для практических целей быстроту и точность, является наиболее универсальным и автономным. Выполнение расчетов маневрирования графически обязательно даже в том случае, когда решение задачи обеспечивается другими способами. Это дублирование вызывается требованиями живучести управления.
Графическое решение задач маневрирования может выполняться на навигационной карте, на листе бумаги или на маневренном планшете. Маневренный планшет (см. рис. 4.7) представляет собой совмещенные азимутальную и стадиметрическую сетки. Началом координат является совмещенный центр обеих сеток.
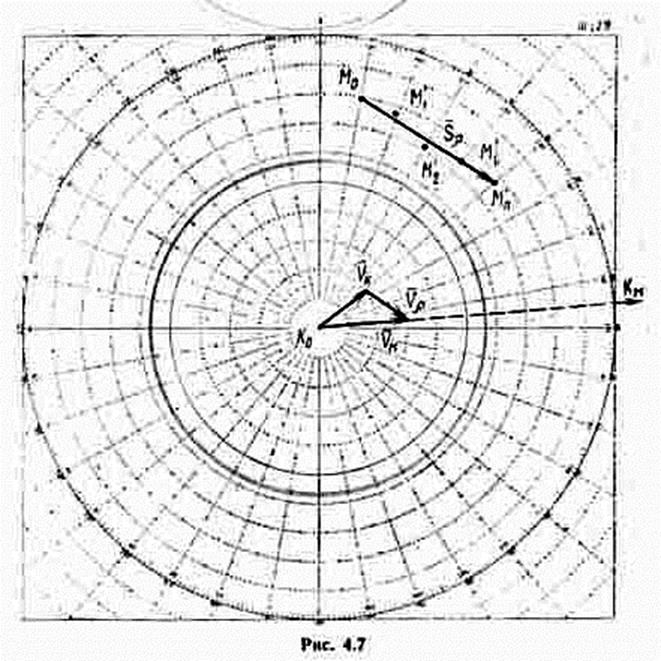
Азимутальная сетка образована рядом радиальных прямых, проведенных из центра планшета через каждые 10°. Стадиметрическая сетка служит масштабной шкалой. Она образована рядом концентрических окружностей, проведенных на одинаковом удалении одна от другой. На внешней окружности стадиметрической сетки нанесены две шкалы градусных делений от 0 до 360°.
Наружная шкала обозначает направления от центра планшета относительно линии 0-180, принятой за меридиан. Внутренняя шкала отличается от внешней на 180, поэтому она используется при нанесении (снятии) обратных пеленгов.
За единицу масштаба на маневренном планшете принимается одно большое деление - расстояние между соседними концентрическими оцифрованными окружностями. Для построения треугольника скоростей это деление принимается равным 1 каб/мин. Масштаб расстояний выбирается в зависимости от дистанции до объекта маневра и тенденции ее изменения. В практике тактического маневрирования наиболее часто одно большое деление планшета соответствует 10 каб.
Зная элементы движения кораблей и их начальное взаимное положение, можно, построив треугольник скоростей, из позиции М0 провести относительный курс Кr (рис. 4.5), определить (прогнозировать) взаимное положение кораблей на любой момент времени. Типовыми задачами такого рода являются:
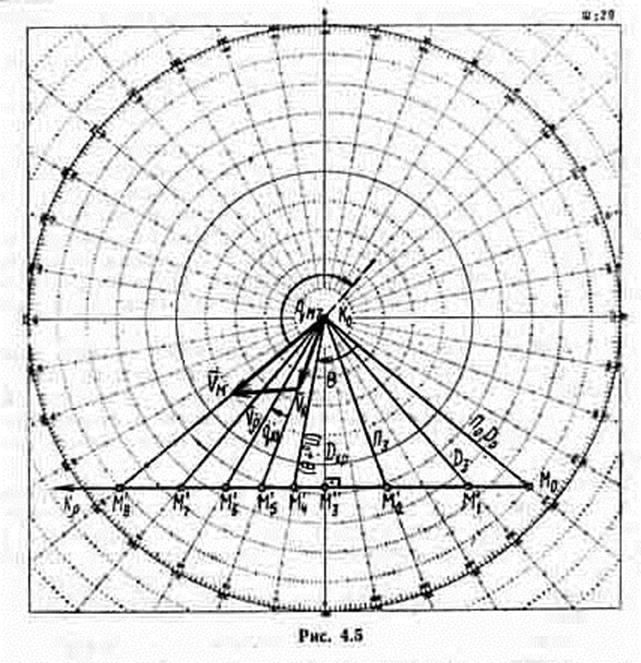
1. Расчет позиции маневрирующего корабля, когда расстояние до объекта маневра равно заданной величине D3.
Для решения задачи нужно раствором циркуля, равным в принятом масштабе заданной дистанции, из точки К0 сделать засечку на линии относительного движения Кr. Полученная точка М '1 соответствует заданному положению между кораблями.
2. Расчет позиции, когда пеленг на объект маневра равен заданному значению П3.
Проведя из точки К0 линию заданного пеленга, получим точку пересечения ее с линией относительного курса Кr, в которой находится позиция М '2 соответствующая поставленному условию.
3. Определение момента, когда расстояние между кораблями кратчайшее Dкр.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.