4.8.4 Изменение направления на цель в кратчайший срок
Такая задача может решаться при занятии исходной позиции для совместного применения оружия группой кораблей с нескольких направлений, для быстрейшего выхода на угрожаемое направление относительно охраняемых сил при плавании в составе соединения и т. п.
Для выхода в кратчайший срок на заданное относительно объекта маневра направление необходимо маневрировать курсом, перпендикулярным заданному направлению. В этом случае длина отрезка абсолютного перемещения маневрирующего корабля будет наименьшей. Действительно, построив треугольник скоростей K0аb (рис. 4.11), где вектор Vм перпендикулярен заданному пеленгу П1 и направлен в сторону этого пеленга, находим вектор относительной скорости Vr, а в точке пересечения линии относительного курса, проведенного из начальной позиции маневрирующего корабля М0, с линией заданного пеленга получим относительную позицию М '1.
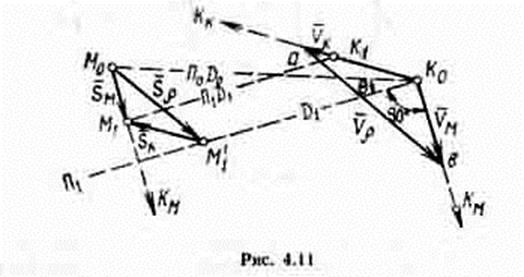
Из треугольника перемещений М0М1М '1 видно, что абсолютное перемещение корабля М0М1 является кратчайшим расстоянием до линии заданного пеленга, так как угол М0М1К1 - прямой. Кратчайшим поэтому является и время маневра, которое можно рассчитать как через элементы относительного движения, так и через элементы абсолютного движения.
Помимо курса и времени искомым элементом в данной задаче является также дистанция в момент выхода на заданное направление, так как, стремясь к быстрейшему изменению направления, можно выйти за пределы диапазона выгодных дистанций. Эту дистанцию D1 = К0М '1 необходимо измерить, построив треугольник позиций М0К0М '1. Может оказаться, что эта позиция будет невыгодна по дистанции. В этом случае целесообразен маневр выхода на заданное направление и избранную выгодную дистанцию, то есть должен быть применен общий случай перемены позиции.
4.8.5 Критический курсовой угол
При решении задач на изменение позиции относительно объекта маневра может оказаться, что Vм < Vк. Тогда критерием возможности занятия заданной позиции маневрирующим кораблем служит сектор возможных относительных курсов (СВОК). Его можно определить графически. Для этого из конца вектора скорости объекта маневра Vк необходимо провести касательные к окружности радиуса, равного скорости хода маневрирующего корабля (рис. 4.12). Сектор bас, ограниченный предельными относительными курсами маневрирующего корабля, и есть СВОК. В этом секторе располагаются все возможные относительные курсы маневрирующего корабля. СВОК, вершина которого совпадает с начальной позицией, называют сектором доступных позиций (СДП).
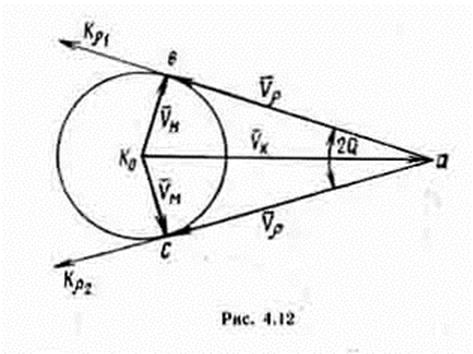
Наибольший курсовой угол объекта маневра, при котором маневрирующий корабль, имея скорость, меньшую скорости объекта маневра, еще может сблизиться с ним при постоянстве пеленга, называется критическим курсовым углом и обозначается Q.
Из DК0аb следует: sin Q = Vм / Vк, откуда Q = arcsin Vм / Vк. Поэтому для оценки возможностей сближения с объектом маневра (при Vм < Vк) кроме графических построений пользуются сравнением текущего курсового угла объекта маневра (цели) с критическим Q. Условие сближения на заданную дистанцию при постоянстве пеленга: qк £ Q. Если qк = Q, линия курса маневрирующего корабля должна быть перпендикулярна линии пеленга (qм = 90°).
4.8.6 Удержание позиции
Как правило, в этом случае позиция задается курсовым углом объекта маневра qк3 н дистанцией Dз. Задачу удержания позиции очень часто приходится решать при совместном плавании, когда охраняемый корабль (уравнитель) изменяет курс, а корабль охранения должен удерживать заданную позицию. Кроме того, задача удержания позиции решается при слежении за противником, при применении оружия и в некоторых других случаях.
Пусть кораблю охранения приказано маневрировать относительно охраняемого корабля, следующего курсом Кк0 со скоростью Vк, удерживая постоянными его курсовой угол qк3 и заданную дистанцию D3.
Перед началом выполнения маневра флагман сообщает на маневрирующий корабль время изменения своего курса и его новое значение Кк1. Корабль охранения должен осуществлять маневр для сохранения ранее заданной позиции, то есть к концу маневра ему необходимо быть на первоначально назначенных курсовом угле qк3 и дистанции от уравнителя D3.
С этой целью определяется курс маневрирующего корабля Kм при заранее назначенной скорости хода Vм для занятия заданной позиции относительно нового курса объекта маневра и время маневра.
На маневренном планшете задача решается как частный случай изменения позиции. Начальная позиция маневрирующего корабля М0 (рис. 4.13) наносится по пеленгу П0 = Кк0 ± qк3 и дистанции D3. Относительная позиция М '1 в момент окончания маневра наносится по пеленгу П1 = Кк1 ± qк3 и дистанции D3. Соединив точки K0, М0 и М '1, получим треугольник позиций К0М0М '1, сторона М0М '1 которого представляет собой вектор относительного перемещения Sr.
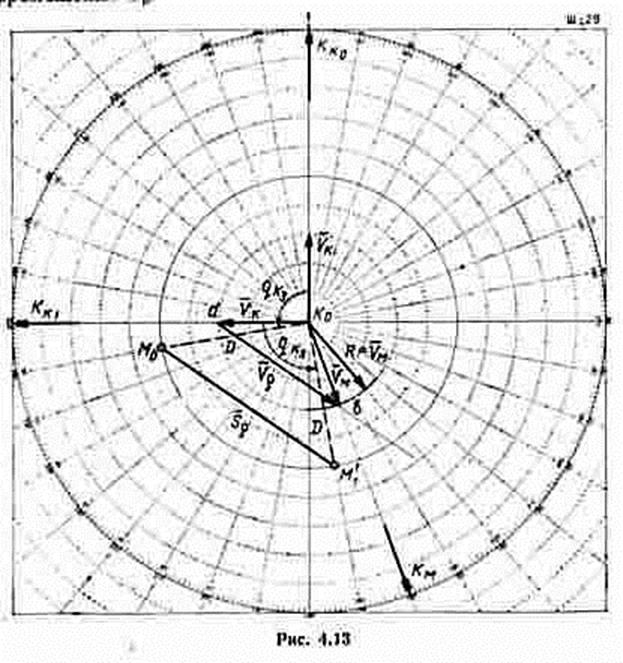
Построение треугольника скоростей производится при точке К0 на линии нового курса объекта маневра Кк1. Для этого по линии курса Кк1 откладывается вектор скорости Vк и из его конца (точка а) проводится линия параллельно вектору Sr и в том же направлении до пересечения с окружностью, равной (в принятом масштабе) скорости маневрирующего корабля Vм. Соединив центр планшета с полученной точкой, получим треугольник К0аb, сторонами которого являются векторы скоростей Vм, Vк, Vr. Направление вектора скорости Vм определяет курс маневрирующего корабля Км для удержания заданной позиции относительно объекта маневра. Время маневра t определяется из отношения Sr / Vr. Если изменение курса объектом маневра осуществляется в сторону от маневрирующего корабля, а Vм < Vк, такая задача решения не имеет.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.