 |
Элемент Differential
Внешний вид и назначение выводов показаны на рис. 68, где Inp (FLOAT) - входной сигнал, dT (TIMER) - приращение времени, Out (FLOAT) - выход дифференциатора. Алгоритм работы следующий. Отсчеты для дифференциатора берутся с дискретностью не менее 0.01 секунды. Дифференцирование производится по следующей формуле:
Out = (Inp-Prev)/dT,
где Out - выход дифференциатора, Inp - значение текущего отсчета, Prev - значение предыдущего отсчета, dT - время между предыдущим и текущим отсчетами.
 FBD
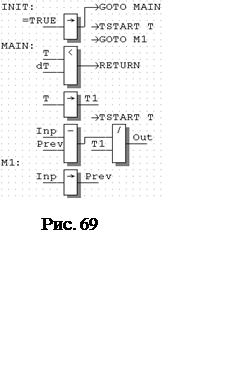
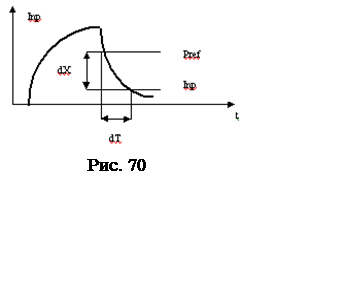
программапоказана нарис. 69. Диаграмма работы представлена на рис. 70. В
секции INIT, которая выполняется один раз при первом проходе,
инициализируется таймерная переменная Т и переменной Prev присваивается
значение переменной Inp. Отсчёты берутся за промежуток времени, не меньший,
чем dT(dT не может быть 0s). Время между
последними отсчётами Т1. Значение на выходе дифференциатора: Out=(Inp-Prev)/T1.
Значение последнего отсчёта в Prev.
FBD
программапоказана нарис. 69. Диаграмма работы представлена на рис. 70. В
секции INIT, которая выполняется один раз при первом проходе,
инициализируется таймерная переменная Т и переменной Prev присваивается
значение переменной Inp. Отсчёты берутся за промежуток времени, не меньший,
чем dT(dT не может быть 0s). Время между
последними отсчётами Т1. Значение на выходе дифференциатора: Out=(Inp-Prev)/T1.
Значение последнего отсчёта в Prev.
 |
Пропорционально-интегрально-дифференциальный регулятор
Элемент PID_Regul
 Внешний вид и назначение выводов показаны на рис. 71, где Inp (FLOAT) - регулируемый параметр, Ref (FLOAT)
- значение стабилизации, Kp (FLOAT) - коэффициент пропорциональности, Ki
(FLOAT) - коэффициент интегратора, Imin (FLOAT)
- минимальное значение интегратора, Imах (FLOAT) -
максимальное значение интегратора, Ival (FLOAT) -
предустановка значения интегратора, Kd (FLOAT) -
коэффициент дифференциатора, dT (TIMER) - приращение времени для дифференцирования, Dlt
(FLOAT) - остаточное рассогласование, Out
(FLOAT) - выход регулирования.
Внешний вид и назначение выводов показаны на рис. 71, где Inp (FLOAT) - регулируемый параметр, Ref (FLOAT)
- значение стабилизации, Kp (FLOAT) - коэффициент пропорциональности, Ki
(FLOAT) - коэффициент интегратора, Imin (FLOAT)
- минимальное значение интегратора, Imах (FLOAT) -
максимальное значение интегратора, Ival (FLOAT) -
предустановка значения интегратора, Kd (FLOAT) -
коэффициент дифференциатора, dT (TIMER) - приращение времени для дифференцирования, Dlt
(FLOAT) - остаточное рассогласование, Out
(FLOAT) - выход регулирования.
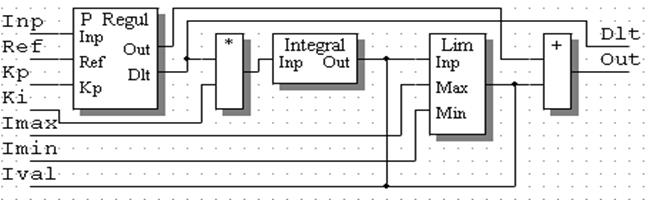
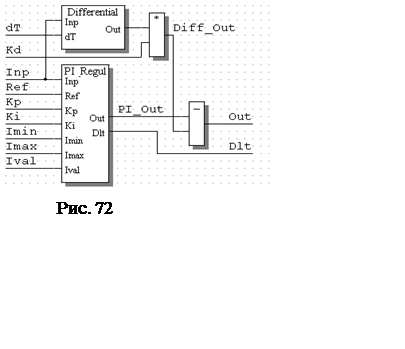
Алгоритм работы следующий. При пропорциональном регулировании остаточное рассогласование тем меньше, чем больше Kp.Следует иметь в виду, что в результате неизбежного фазового сдвига в контуре регулирования Kp не может быть слишком большим, иначе система самовозбудится. Из-за невозможности задать слишком большой коэффициент пропорциональности Kp, для устранения погрешности регулирования, остаточное рассогласование накапливается в интеграторе и суммируется с выходом пропорционального регулятора. Интегратор имеет вход предустановки Ival, т.е. в него можно записать начальное значение. Размер интегрируемой остаточной погрешности может быть ограничен как в положительную, так и в отрицательную сторону значениями переменных Imax и Imin соответственно. Положительная погрешность регулирования накапливается в интеграторе, если регулируемый параметр Inp меньше значения стабилизации Ref, и, наоборот, отрицательная, если Inp больше Ref. Для масштабирования накопленной в интеграторе погрешности регулирования есть коэффициент Ki. Для устранения нежелательных колебаний в контуре управления желательно знать тенденцию изменения регулируемого параметра. Для этого переменная Inp дифференцируется за время, заданное значением переменной dT. Полученный дифференциал дает представление о скорости и направлении изменения регулируемого параметра. Его можно масштабировать коэффициентом Kd. На выход регулятора подается разностный сигнал между выходом PI_Regul и продифференцированным значением Inp.
 FBD
программа показана на рис. 72.
FBD
программа показана на рис. 72.
Библиотека имеет в своем составе широкий круг преобразователей. Рассмотрим некоторые из них.
Преобразование 0-20мА в коды для 5024
Элемент mA_Code
Внешний вид и назначение выводов показаны на рис. 73, где  mA (FLOAT)
- входное значение в миллиамперах, Code (INTEGER) -
выходное значение в кодах ЦАП ADAM-5024.
mA (FLOAT)
- входное значение в миллиамперах, Code (INTEGER) -
выходное значение в кодах ЦАП ADAM-5024.
В FBD программе (рис.
74) 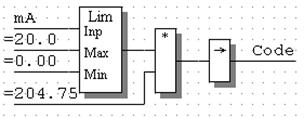 переменная mA
ограничивается диапазоном от 0 до 20. Полученное значение умножается на
коэффициент пропорциональности и преобразуется в тип Integer.
переменная mA
ограничивается диапазоном от 0 до 20. Полученное значение умножается на
коэффициент пропорциональности и преобразуется в тип Integer.
Рис. 74
Преобразование 0-10V в коды для 5024
Элемент V_Code
 V (FLOAT) - входное значение в вольтах, Code (INTEGER) - выходное значение в кодах ЦАП ADAM-5024.
V (FLOAT) - входное значение в вольтах, Code (INTEGER) - выходное значение в кодах ЦАП ADAM-5024.Алгоритм работы следующий. Элемент предназначен для преобразования входного значения, выраженного в вольтах, в кодах цифро-аналогового преобразователя модуля ADAM-5024. Входное значение может быть в пределах от 0 до 10 вольт, что соответствует кодам ЦАП от 0 до 4095.
В FBD программе (рис.
76) 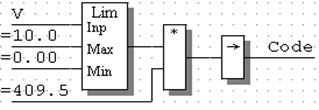 переменная V
ограничивается диапазоном от 0до 20. Полученное значение умножается на
коэффициент пропорциональности и преобразуется в тип Integer.
переменная V
ограничивается диапазоном от 0до 20. Полученное значение умножается на
коэффициент пропорциональности и преобразуется в тип Integer.
Рис. 76
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.