 |
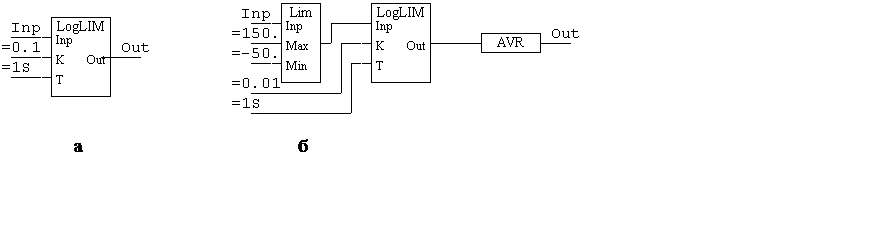
Рис. 27
Для лучшей фильтрации можно применять комбинированные фильтры. Например, сначала определить диапазон входного сигнала блоком Lim, потом ограничить скорость изменения блоком LinLIM или LogLIM, а затем усреднить выборку блоком AVR (рис. 27, б).
Установка регуляторов
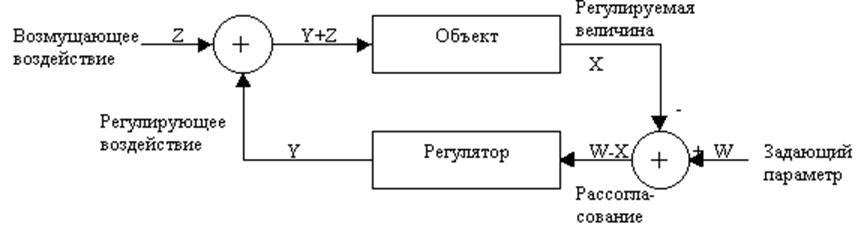 |
Рис. 28
 Регулятор влияет на регулируемую величину Х с помощью
регулирующего воздействия Y так, чтобы рассогласование регулирования W-X
было возможно меньшим. Воздействующее на объект регулирования возмущение формально
можно представить величиной помехи Z, аддитивно накладывающейся на
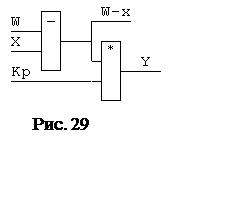
заданный параметр. Простейшим примером такого регулятора является П-регулятор
(рис. 29).
Регулятор влияет на регулируемую величину Х с помощью
регулирующего воздействия Y так, чтобы рассогласование регулирования W-X
было возможно меньшим. Воздействующее на объект регулирования возмущение формально
можно представить величиной помехи Z, аддитивно накладывающейся на
заданный параметр. Простейшим примером такого регулятора является П-регулятор
(рис. 29).
Если регулируемая величина Х не равна заданному значению W, появляется рассогласование W-X. Благодаря этому регулирующее воздействие Y изменяется на величину (W-X) Kp. Это изменение компенсирует разность W-X. В установившемся режиме остаточное рассогласование будет меньше при большем коэффициенте пропорциональности регулятора Кр. Однако следует учитывать, что коэффициент усиления в цепи обратной связи не может быть сколь угодно большим, так как сдвиг фазы в контуре регулирования приведёт к возникновению колебаний. Чтобы обеспечить возможно меньшую погрешность регулирования и нужную переходную характеристику, к П-регулятору добавляют интегратор и дифференциатор, получая ПИ- или ПИД-регулятор.
Моделирование объектов управления
Практическая отладка программ управления сложным объектом является достаточно трудоёмким процессом и сопряжена с опасностью непредвиденной реакции реального объекта на управляющие воздействия. Избежать подобной ситуации, а также произвести предварительную отладку программы с подбором управляющих воздействий позволяет моделирование объекта управления.
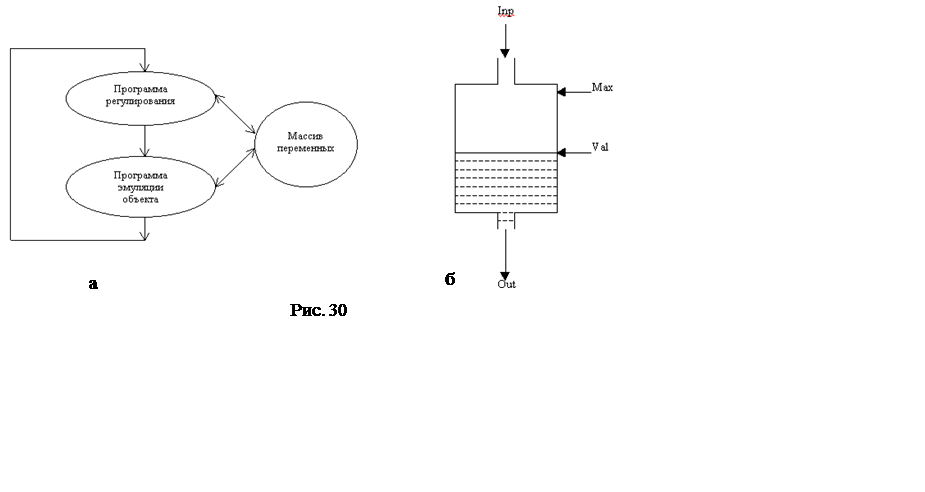 |
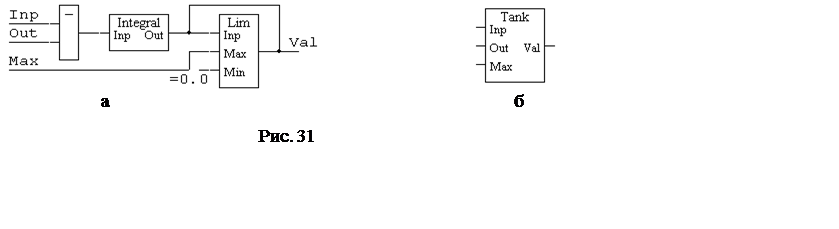
Рассмотрим модель абстрактного процесса в виде резервуара, уровень жидкости в котором (значение параметра регулирования) определяется соотношением объёма втекающей и вытекающей из него жидкости (рис. 30, б). Обозначим количество воды, втекающей в резервуар за единицу времени, – Inp, а количество воды, вытекающей из резервуара в единицу времени, – Out. Уровень воды в резервуаре – Val, максимально возможный уровень – Мах.
Программа, реализующая данную модель объекта, представлена на рис. 31, а. Программа-модель резервуара в виде библиотечного блока показана на рис. 31, б.
 |
Модель объекта в виде библиотечного блока показана на рис. 32, б.
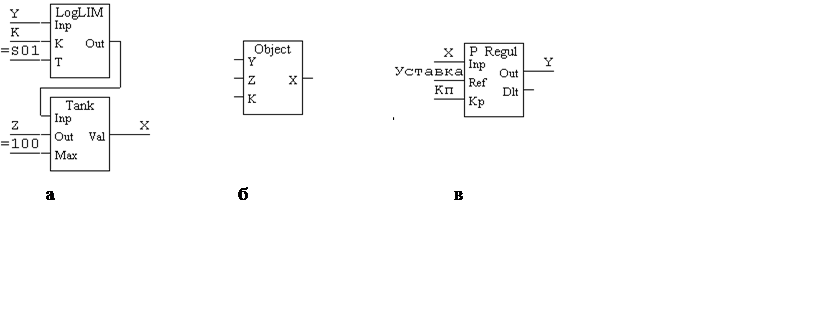 |
 На рис. 32, а, б обозначены: Y – регулирующее
воздействие, Z – внешнее возмущающее воздействие, X – состояние объекта
(обратная связь), K – коэффициент реакции объекта.
На рис. 32, а, б обозначены: Y – регулирующее
воздействие, Z – внешнее возмущающее воздействие, X – состояние объекта
(обратная связь), K – коэффициент реакции объекта.
Данная модель с определённой степенью приближения эмулирует такие физические процессы, как изменение температуры объекта, давления, объёма и т.д. Так, в случае моделирования процесса нагревания Y – количество тепла, передаваемое объекту, Z – тепловые потери, К – теплоёмкость объекта.
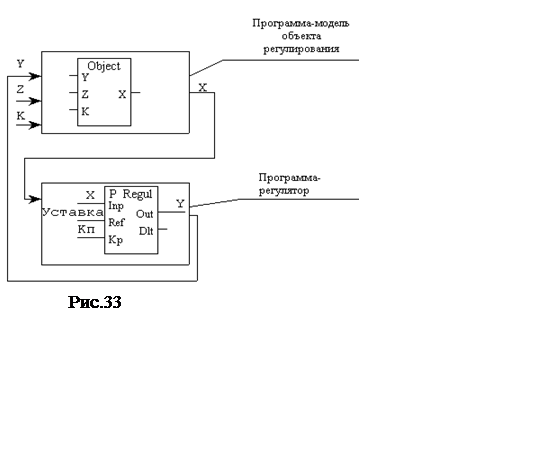
Предположим, необходимо исследовать поведение программы стабилизации параметра, представленной на рис. 32, в. Для этого исследуемая программа должна быть замкнута с программой модели через общие глобальные переменные, как показано на рис. 33, где контур регулирования состоит из объекта регулирования и регулятора. На объект воздействует два фактора: управляющее воздействие регулятора и случайная внешняя помеха, которая вносит искажения в управляющий сигнал. От объекта к регулятору идёт обратная связь, характеризующая состояние объекта. Коэффициент К определяет время реакции объекта на управляющее воздействие.
Примеры эмуляторов объектов находятся в библиотеке Еmulator. В демонстрационном проекте Regul.plc приведён пример программы регулирования замкнутой программой эмуляции объекта.
3.2. Описание стандартной библиотеки средств автоматики
Библиотека включает в себя различные виды модуляторов генераторов, фильтров, компараторов и регуляторов.
Широтно-импульсный модулятор
 Элемент РWМ
Элемент РWМ
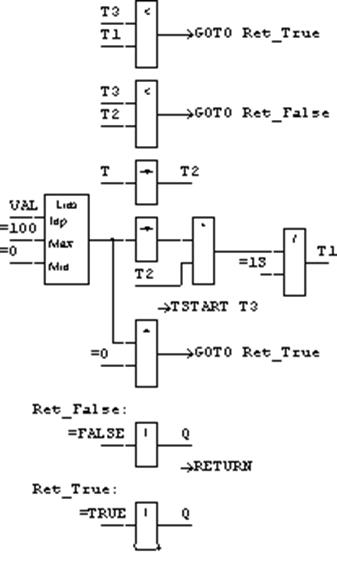 Внешний вид и назначение выводов показаны на рис.
34, а, где T (TIMER) – период, VAL (INTEGER) - длительность импульсов (скважность) в процентах от T, Q (BOOLEAN) – выход.
Внешний вид и назначение выводов показаны на рис.
34, а, где T (TIMER) – период, VAL (INTEGER) - длительность импульсов (скважность) в процентах от T, Q (BOOLEAN) – выход. Элемент предназначен для управления исполнительными механизмами постоянной скорости в системах регулирования. На входе T задается период следования импульсов.VAL может принимать значение от 0 до 100 и определяет длительность импульсов в процентах от значения T.Сигнал снимается с выхода Q. Новые значения T и VAL устанавливаются только по окончании предыдущего цикла.
FBD программа представлена нарис. 34, б.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.