Расчёт выходного значения ведётся при Т1 более или равной S01. Выходной сигнал Out вычисляется по формуле:
Out=Out+(Inp-Out)/N,
где N=T/T1+1.
|
|
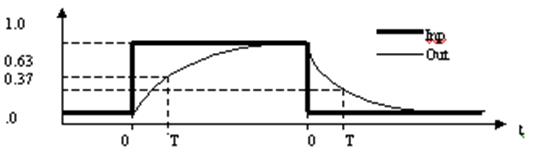 |
ВЧ фильтр первого порядка (1)
Элемент НPF1
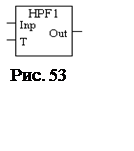 Внешний вид и назначение выводов показаны на рис. 53,
где Inp (FLOAT) - входное значение, T (TIMER) - постоянная времени
фильтра, Out (FLOAT) - выходное значение.
Внешний вид и назначение выводов показаны на рис. 53,
где Inp (FLOAT) - входное значение, T (TIMER) - постоянная времени
фильтра, Out (FLOAT) - выходное значение.
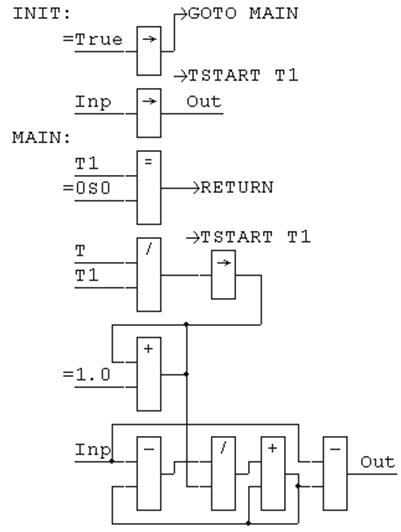 В FBD программе (рис.
54) при инициализации блока значение переменной Inp копируется в
Out. Локальная таймерная переменная Т1 измеряет промежуток
времени между отсчётами. Расчёт выходного значения ведётся при Т1 больше или
равной S01. Выходной сигнал Out вычисляется
по формуле:
В FBD программе (рис.
54) при инициализации блока значение переменной Inp копируется в
Out. Локальная таймерная переменная Т1 измеряет промежуток
времени между отсчётами. Расчёт выходного значения ведётся при Т1 больше или
равной S01. Выходной сигнал Out вычисляется
по формуле:
Out=Inp-Lpf, где Lpf=Lpf+(Inp-Lpf)/N, N=T/T1+1.
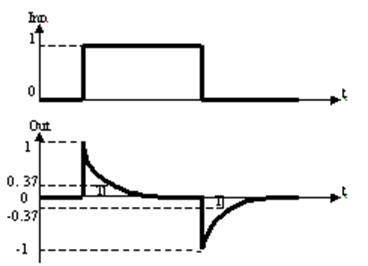
Диаграмма работы показана на рис. 55.
|
||||
|
||||
 |
Компаратор с гистерезисом
Элемент HRegul
 Внешний вид и назначение выводов показаны на рис. 56, где Inp (AUTO) -
регулируемый параметр, Ref (AUTO) - значение стабилизации, Range (AUTO)
- величина зоны нерегулирования, Out (BOOLEAN) - выход на регулирование.
Внешний вид и назначение выводов показаны на рис. 56, где Inp (AUTO) -
регулируемый параметр, Ref (AUTO) - значение стабилизации, Range (AUTO)
- величина зоны нерегулирования, Out (BOOLEAN) - выход на регулирование.
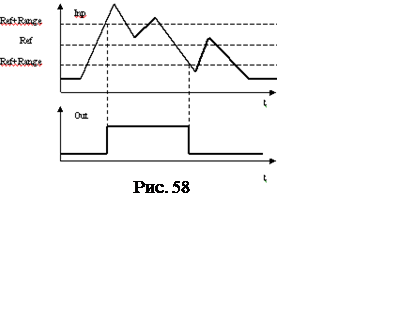
Алгоритм работы следующий. Выход Out примет значение TRUE, когда значение переменной Inp больше Ref, и FALSE - если меньше. В зоне от Ref-Range до Ref+Range регулирование не ведется. Все выводы, имеющие тип AUTO, могут иметь типы INTEGER или FLOAT, но обязательно должны быть одного типа и явно объявлены снаружи библиотечного блока.
 В FBD программе(рис. 57)
В FBD программе(рис. 57) 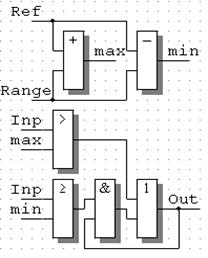 проводится вычисление
зоны регулирования : min=Ref-Range, max=Ref+Range. Out примет значение TRUE в двух случаях: если Inp больше max; если Inp больше или равно min и Out=TRUE.
Диаграмма работы показана на рис. 58.
проводится вычисление
зоны регулирования : min=Ref-Range, max=Ref+Range. Out примет значение TRUE в двух случаях: если Inp больше max; если Inp больше или равно min и Out=TRUE.
Диаграмма работы показана на рис. 58.
Рис. 57
Непрерывное среднее
 Элемент AVR
Элемент AVR
Внешний вид и назначение выводов показаны на рис. 59, где Inp (AUTO) - входное значение, N (AUTO) - количество отсчетов для усреднения, Out (AUTO) - среднее из N отсчетов.
 Алгоритм работы следующий. Расчет ведется по формуле Out =
Out + (Inp-Out)/N. N должно быть целым числом больше 0. Выводы AUTO
могут иметь тип INTEGER, TIMER или FLOAT, но обязательно должны быть одного типа и явно
объявлены снаружи блока.
Алгоритм работы следующий. Расчет ведется по формуле Out =
Out + (Inp-Out)/N. N должно быть целым числом больше 0. Выводы AUTO
могут иметь тип INTEGER, TIMER или FLOAT, но обязательно должны быть одного типа и явно
объявлены снаружи блока.
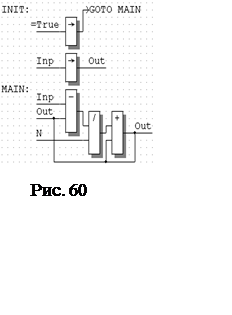
В FBD программе (рис. 60) в секции инициализации выходному значению Out присваивается значение переменной Inp. Значение переменной Out вычисляется по формуле Out=Out+(Inp-Out/N).
Пропорциональный регулятор
Элемент P_Regul
Внешний вид и назначение выводовпоказаны на
рис.61, где 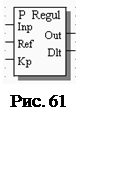 Inp (AUTO)
- регулируемый параметр, Ref (AUTO) - значение стабилизации, Kp (AUTO)
- коэффициент пропорциональности, Dlt (AUTO) - выход
рассогласования, Out (AUTO) - выход регулирования.
Inp (AUTO)
- регулируемый параметр, Ref (AUTO) - значение стабилизации, Kp (AUTO)
- коэффициент пропорциональности, Dlt (AUTO) - выход
рассогласования, Out (AUTO) - выход регулирования.
Алгоритм работы следующий. Все выводы, имеющие тип AUTO,могут
иметь типы INTEGER или FLOAT, но обязательно должны быть одного типа и явно
объявлены снаружи библиотечного блока. Разность (рассогласование) между
значением регулируемого параметра и заданным значением стабилизации Dlt
умножается на коэф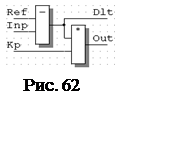 фициент
пропорциональности Kp и используется в качестве регулирующего воздействия. Out = =Dlt * Kp. Остаточное
рассогласование тем меньше, чем больше Kp. Следует
иметь в виду, что в результате неизбежного фазового сдвига в контуре регулирования
Kp не может быть слишком большим, иначе система
самовозбудится. FBD программа показана на рис. 62.
фициент
пропорциональности Kp и используется в качестве регулирующего воздействия. Out = =Dlt * Kp. Остаточное
рассогласование тем меньше, чем больше Kp. Следует
иметь в виду, что в результате неизбежного фазового сдвига в контуре регулирования
Kp не может быть слишком большим, иначе система
самовозбудится. FBD программа показана на рис. 62.
Интегратор
Элемент Integrator
 Внешний вид и назначение выводов
показаны на рис. 63, где Inp
(FLOAT) - входной сигнал, Out (FLOAT) -
выход интегратора.
Внешний вид и назначение выводов
показаны на рис. 63, где Inp
(FLOAT) - входной сигнал, Out (FLOAT) -
выход интегратора.
Алгоритм работы следующий. Отсчеты для интегратора берутся с дискретностью не менее 0.01 секунды. Интегрирование производится по следующей формуле (метод трапеций):
Out = Out+(Inp+Prev)/2·dT, где Out - выход интегратора, Inp - значение текущего отсчета, Prev - значение предыдущего отсчета, dT - время между предыдущим и текущим отсчетами.
В FBD программе рис. 64, в секции INIT, которая выполняется один раз при первом проходе, инициализируется таймерная переменная Т и переменной Prev присваивается значение переменной Inp.
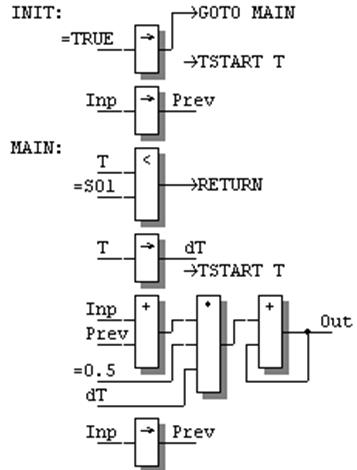 Отcчёты берутся за промежуток времени, не меньший, чем
сантисекунда (0.01). Промежуток времени между последними отсчётами в dT.
Отcчёты берутся за промежуток времени, не меньший, чем
сантисекунда (0.01). Промежуток времени между последними отсчётами в dT.
Приращение сигнала: dX = Inp –Prev.
Значение переменной на выходе интегратора:
Out = Out + [(dX/2+Prev) · dT].
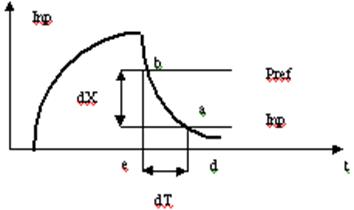 |
Диаграмма работы показана на рис. 65.
Рис. 64 Рис. 65
Пропорционально-интегральный регулятор
Элемент PIRegul
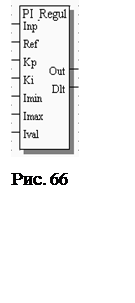 Внешний вид и назначение выводов показаны на рис. 66,
где Inp (FLOAT) - регулируемый параметр, Ref (FLOAT)
- значение стабилизации, Kp (FLOAT) - коэффициент пропорциональности, Ki
(FLOAT) - коэффициент интегратора, Imin (FLOAT)
- минимальное значение интегратора, Imах (FLOAT) -
максимальное значение интегратора, Dlt (FLOAT) - остаточное рассогласование, Out
(FLOAT) - выход регулирования, Ival (FLOAT) - предустановка
значения интегратора.
Внешний вид и назначение выводов показаны на рис. 66,
где Inp (FLOAT) - регулируемый параметр, Ref (FLOAT)
- значение стабилизации, Kp (FLOAT) - коэффициент пропорциональности, Ki
(FLOAT) - коэффициент интегратора, Imin (FLOAT)
- минимальное значение интегратора, Imах (FLOAT) -
максимальное значение интегратора, Dlt (FLOAT) - остаточное рассогласование, Out
(FLOAT) - выход регулирования, Ival (FLOAT) - предустановка
значения интегратора.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.