Содержание схемы: элементы объекта моделирования и связи между ними.
Назначение схемы: общее представление об объекте, способ соединения элементов, последовательность процессов.
Операторная схема:
Содержание схемы: технологические операторы, элементы и их связи.
Назначение схемы: анализ физико-химической сущности процессов объекта моделирования.
-сжатие воздуха и топочных газов
 |
- межфазный обмен
Функциональная схема:
Содержание схемы: технологические операции объекта и их связи.
Назначение схемы: обобщенное представление о процессе функционирования объекта.
2 Этап. Предпроектные НИР.
Анализ ТОУ, информационных потоков, формулировка критерия управления. Разработка предварительных математических моделей.
2.1. Определение односвязности-многосвязности объекта.
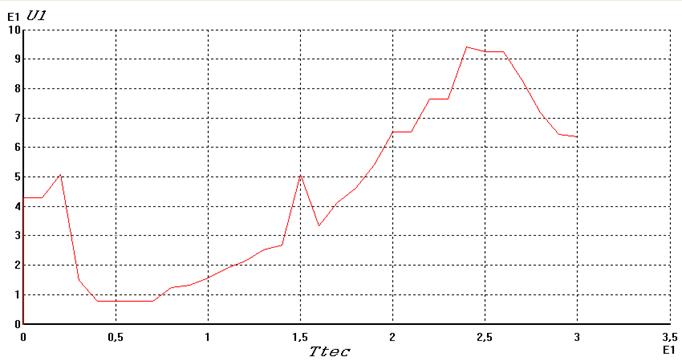
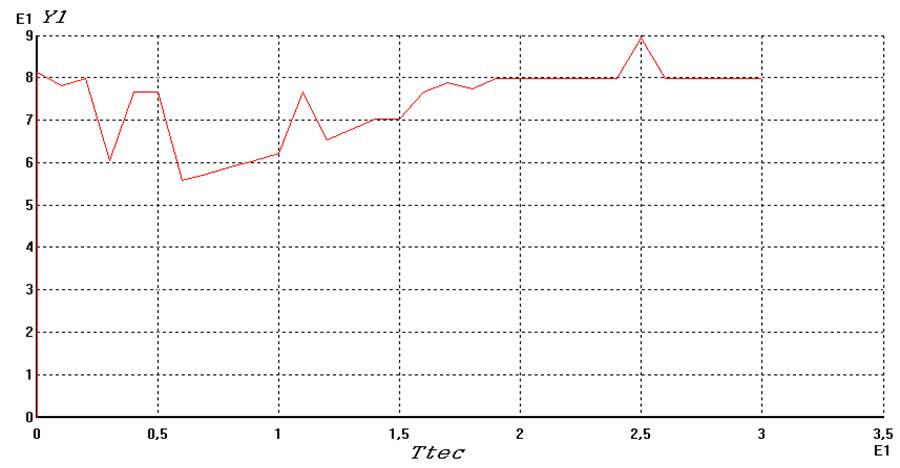
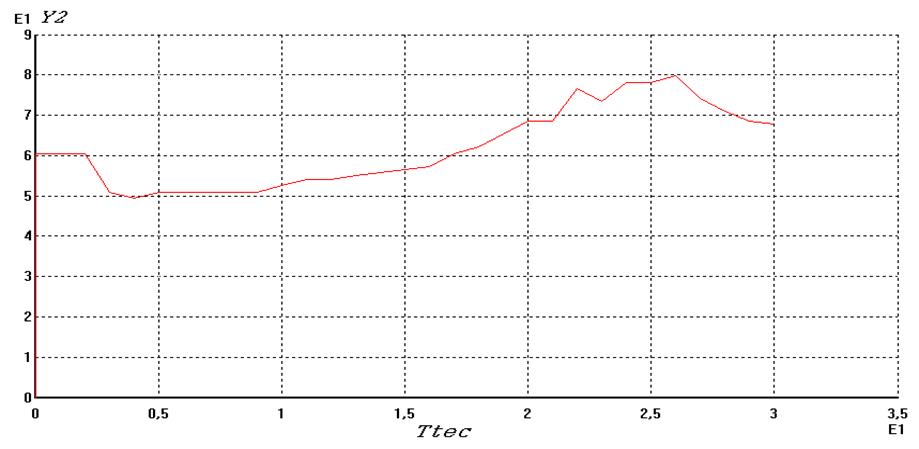
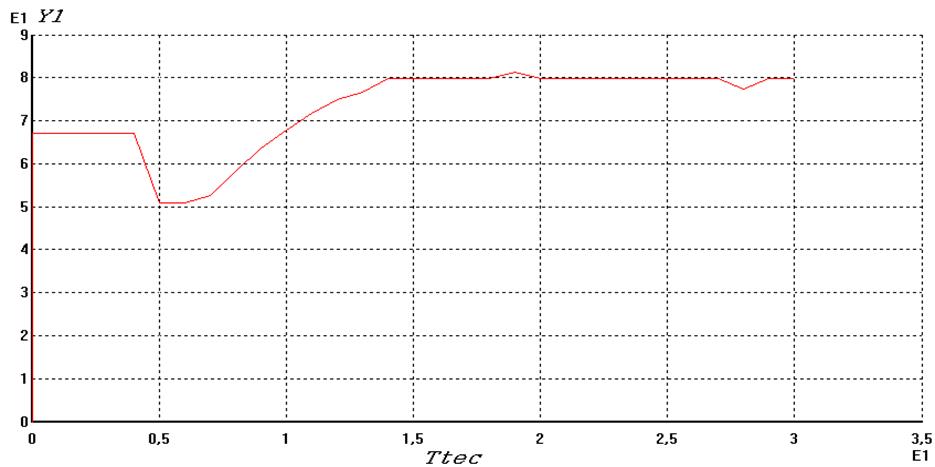
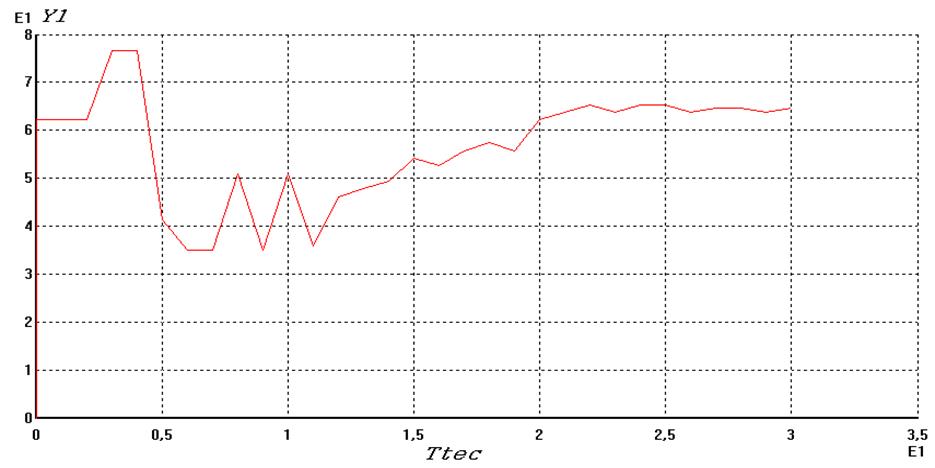
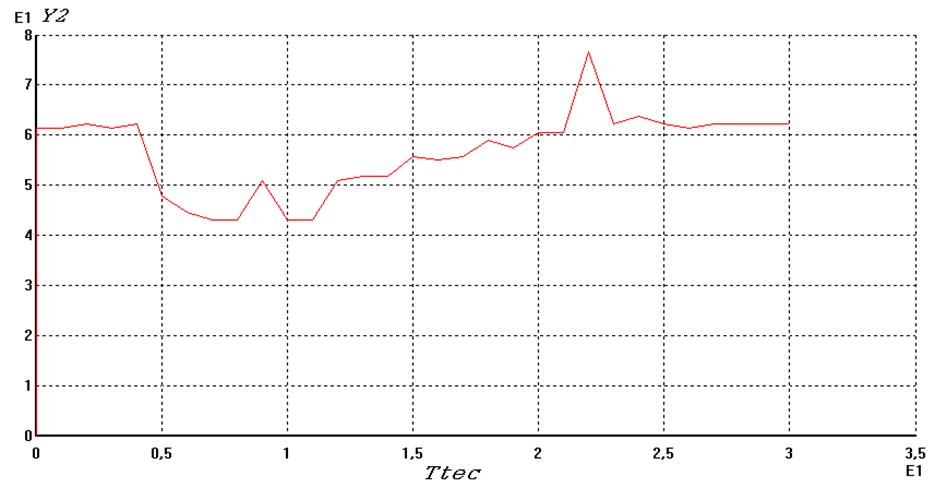
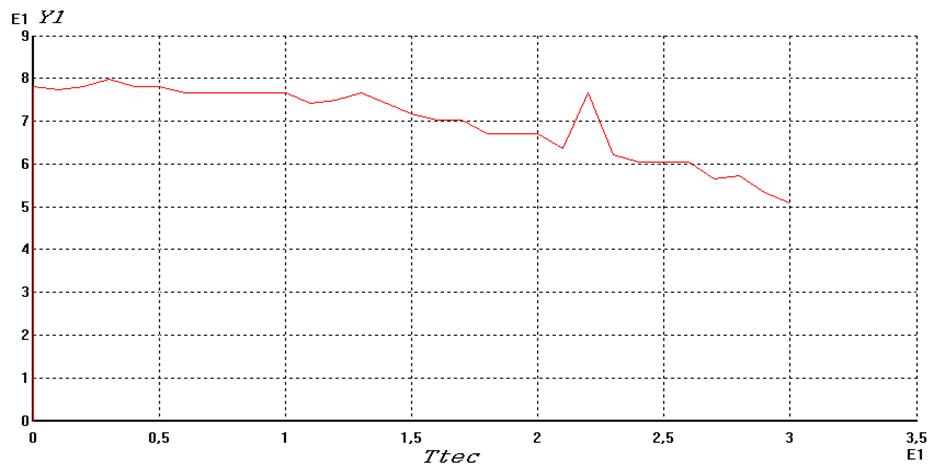
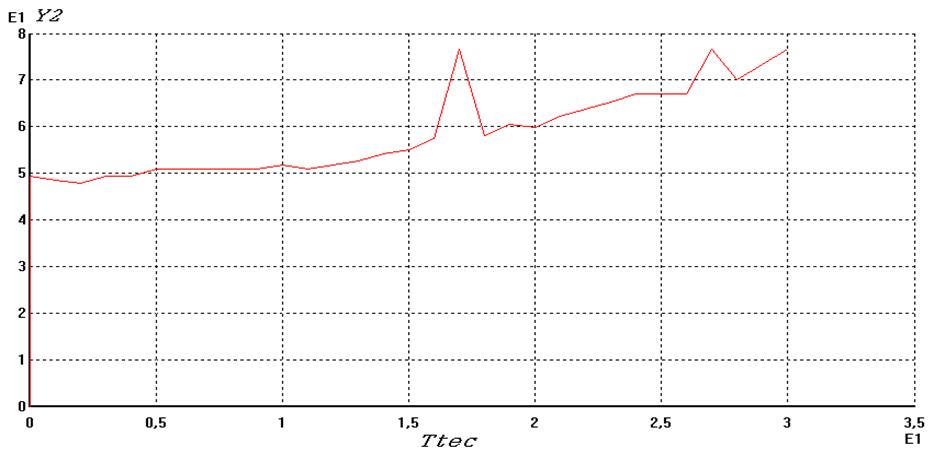
По результатам исследоаия делаем вывод, что исследуемый объект многосвязный, так как при изменении управляющего фактора U1 одновременно изменяются два контролируемых отклика Y1 и Y2.
а) Изменение U1. (Change_u1)
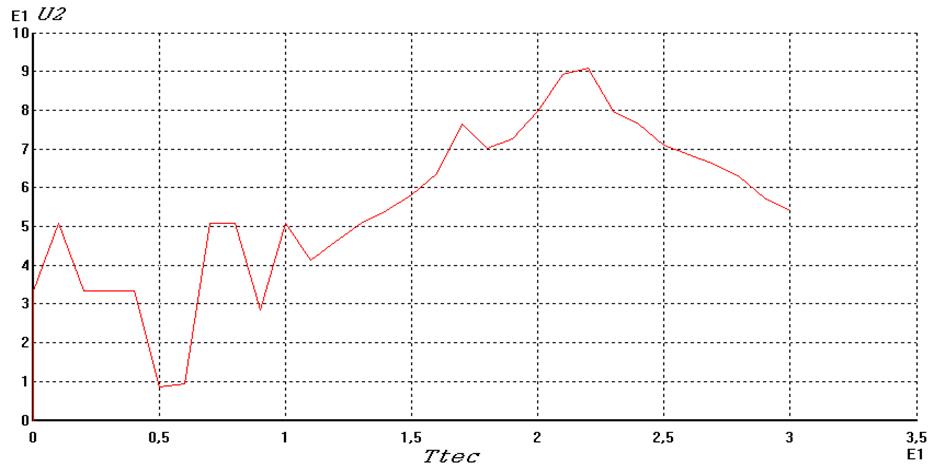
б) Изменение U2 (Change_u2)
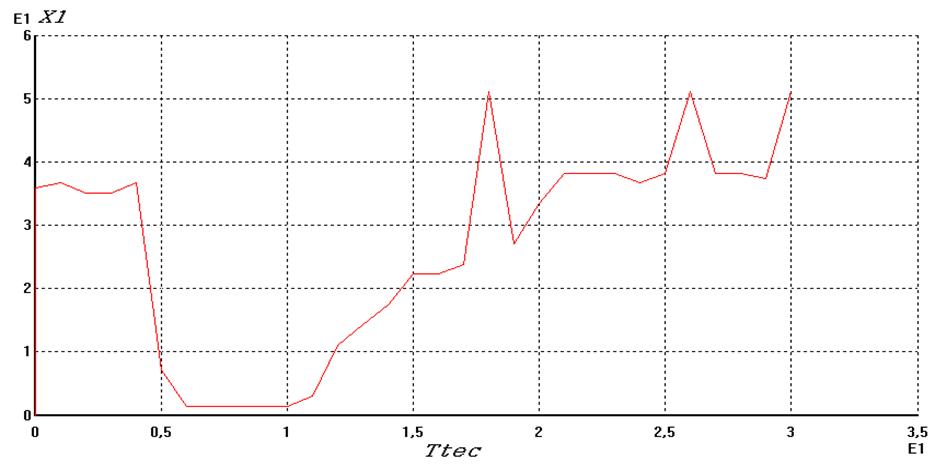
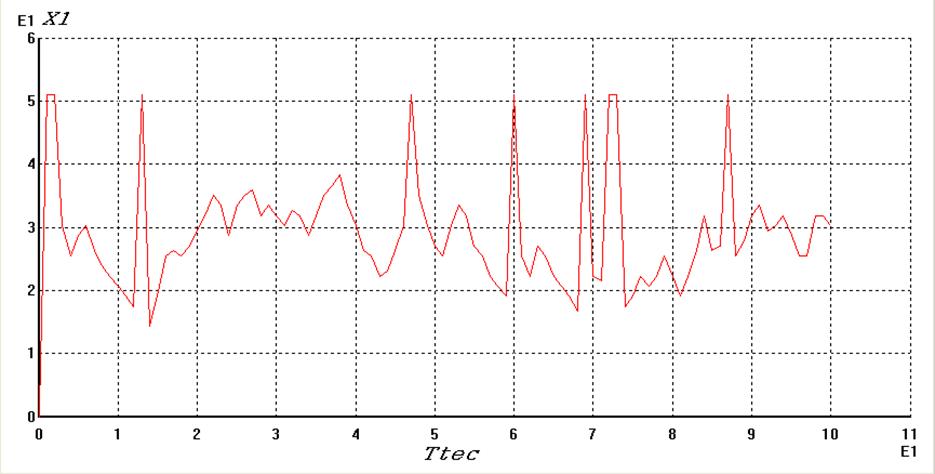
в) Изменение X1 (Change_x1)
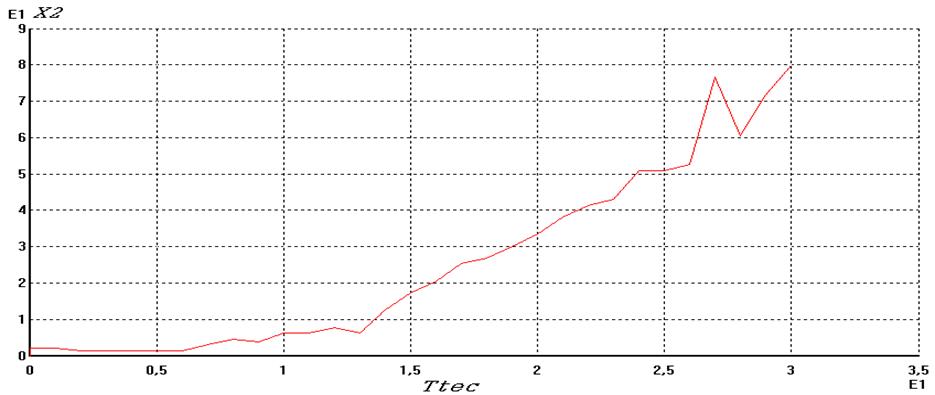
г) Изменение X2 (Change_x2)
2.2. Определение линейности-нелинейности объекта.
Определение: при непрерывном отклике на входное воздействие, аддитивности переменных и независимости параметров от переменных объект считают линейным
Исходя из исследования и теоретических знаний делаем вывод, что объект линейный, так как в зоне управления зависимости Y1(U1) , Y2(U1), Y1(U2), Y2(U2), Y1(X1), Y2(X1), Y1(X2) и Y2(X2) линейны . (Change_u1, Change_u2, Change_x1, Change_x2)
2.3. Определение стационарности-нестационарности ТОУ.(Ctacionarn.I4)

По результатам снятым через месяц (ctacio(povt).txt)\

Оценки математического ожидания по 30 опытам
|
X1 |
X2 |
U1 |
U2 |
Y1 |
Y2 |
Y3 |
|
5.08267 |
2.11733 |
4.11733 |
2.56533 |
7.25867 |
5.616 |
3.42933 |
Оценки математического ожидания по 30 опытам спустя месяц
|
X1 |
X2 |
U1 |
U2 |
Y1 |
Y2 |
Y3 |
|
4.72 |
2.64533 |
4.216 |
2.33333 |
6.872 |
5.46133 |
3.65067 |
Вывод: Объект стационарный, так параметры системы являются независимыми во времени.
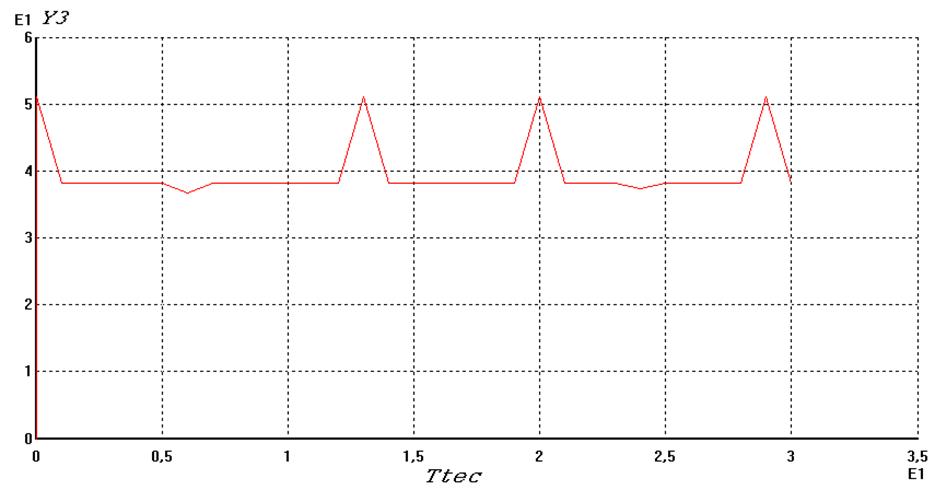
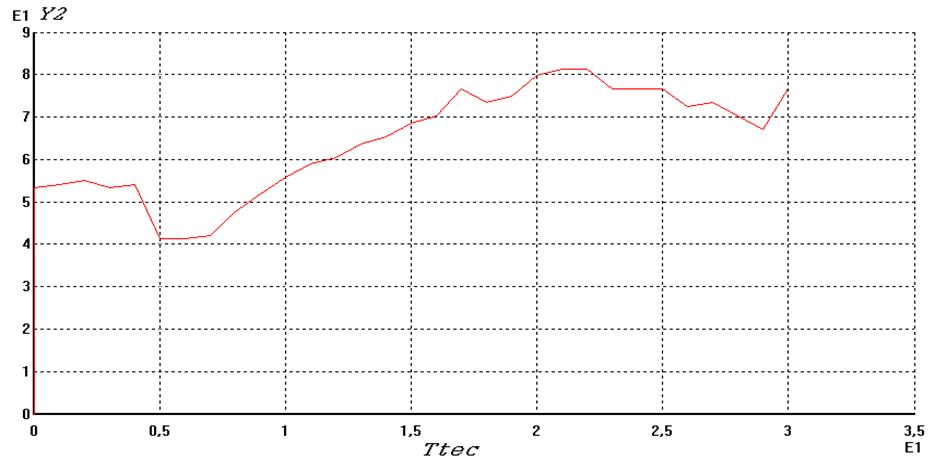
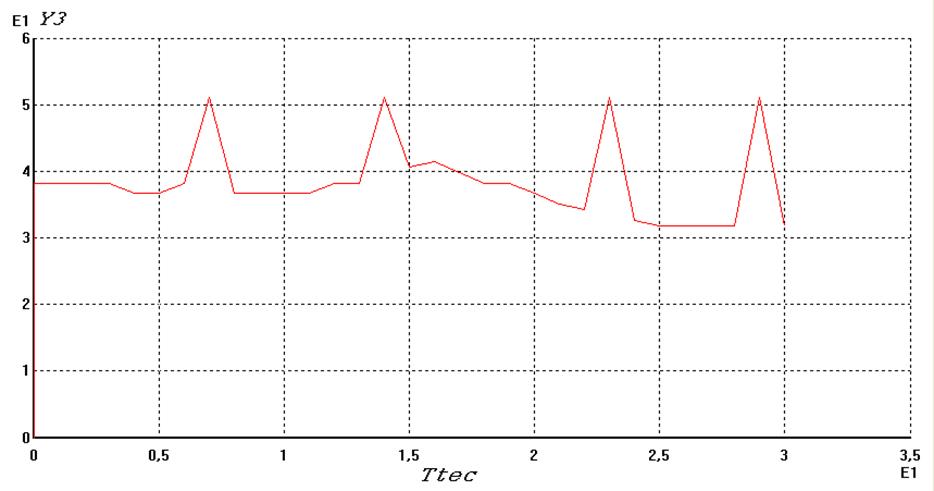
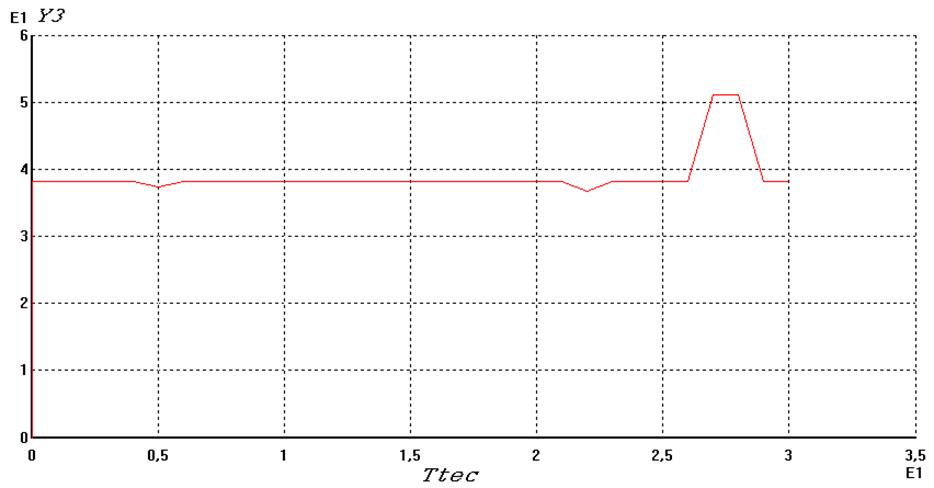
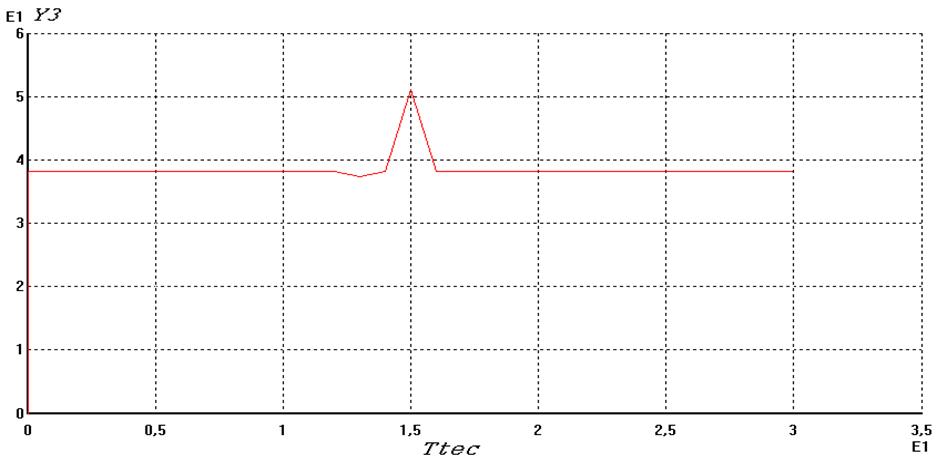
Y1, Y2 – статические,Y3 – динамическая переменная.
2.4. Определение характера изменения контролируемых, но неуправляемых в режиме нормальной эксплуатации возмущений.
Характер изменения контролируемых, но неуправляемых в режиме нормальной эксплуатации возмущений случайный.
2.5. Выявление связи между входными и выхожными переменными.
В результате эксперимента были выявлены следующие связи между выходными и входными переменными, а именно выходные переменные y1(температура продукта) и y2(влажность продукта) зависят от всех входных переменных, а выходная переменная y3(температура в камере) зависит только от входной u2(расход теплоносителя).
2.6. Определение статических и динамических связей между переменными.
Так как при изменении входных переменных выходные y1 и y2 изменяются сразу же, то соответствующие им системы будут статическими, а связи между выходными величинами и входными параметрами можно установить с помощью линейных математических моделей.
Так как прямой зависимости между изменением входных переменных и выходной величины y3 не наблюдается, то соответствующая система будет динамической.
2.7. Определение знаков влияния входных переменных на выходные.
В ходе эксперимента было установлено, что:
-при увеличении параметров U1, U2, X1 значения выходных переменных Y1, Y2 увеличиваются ,следовательно эти параметры входят в математические модели для Y1, Y2 с положительным знаком.
-при возрастании Х2 наблюдается увеличение переменной Y2 и уменьшение переменной Y1. Поэтому Х2 в математическую модель для Y1 входит с отрицательным знаком, а в математическую модель для Y2 – с положительным.

2.8. Выявление в системе случайных неконтролируемых переменных.
В реальных ТОУ с действием большого количества неучтенных факторов, присутствуют случайные неконтролируемые возмущения. В рассматриваемом УИК указанные возмущения задаются с помощью генераторов непрерывных случайных процессов.
Вывод:Технологический объект управления является многосвязным, линейным, стационарным. Характер изменения контролируемых, но неуправляемых в режиме нормальной эксплуатации возмущений случайный. Связи входных переменных X1, X2, U1, U2 с выходными величинами Y1, Y2 являются статическими, а связь между U2 и Y3 динамическая. Параметры U1, U2, X1 входят в математические модели для Y1, Y2 с положительным знаком. Переменная Х2 в математическую модель для Y1 входит с отрицательным знаком, а в математическую модель для Y2 – с положительным.
Математические модели:
Y1=B3*x1-B4*x2+B2*u1+B1*u2;
Y2=A3*x1+A4*x2+A2*u1+A1*u2;
Y3=W (p)*u2;
2.9. Выбор ТЭП ТО и выбор критерия оптимальности работы ТО.
В качестве ТЭП выбираем минимальную дисперсию влажности продукта(Y2). Влажность должна поддерживаться на постоянном уровне чтобы обеспечивался оптимальный режим функционирования технологического объекта.
В качестве критерия оптимальности выберем минимум влажности продукта, так как этот критерий ведёт к повышению целесообразности использования ТО. В качестве критерия эффективности будем принимать ТЭП2.
3 Этап. Эскизная разработка АСУТП.
Предварительная разработка функционально-алгоритмической структуры, выбор КТС, анализ систем-аналогов
Суть алгоритма состоит в поддержании на выходе Y2 значения, максимально близкого к заданному с помощью регулирования входов X1 и X2.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.