Рисунок 8 – Схема размещения датчиков Холла
С одной стороны на подвижной платформе установлен один постоянный магнит, который воздействует на цифровой датчик Холла своим магнитным полем, в тот момент, когда величина магнитной индукции сравняется с порогом срабатывания датчика, цифровой датчик Холла, на выходе, формирует сигнал «1» и отправляет его в микроконтроллер, после чего двигатель прекращает работу. В данном случает «1» соответствует сигналу остановки.
В связи с тем, что платформа находится в движении, а также нагружена существенной массой, на нее будет воздействовать сила инерции, которая не позволит моментально остановить подвижную платформу подъемника. Расстояние, пройденное платформой, сверх установленной нормы называется величиной выбега, которую необходимо исследовать экспериментально и зафиксировать с помощью средств индикации.
Для фиксирования выбега на противоположной стороне платформы также установлен один постоянный магнит, а внутри шахты закреплено восемь цифровых датчиков Холла, с интервалом 5 мм (это позволит определять величину выбега кабины с точностью до +-5мм).
Датчики позиционирования установлены выше и ниже уровня эталонной линии остановки. Это значит, что при выбеге кабины за эту линию, датчики будут формировать сигнал «1», каждый раз, когда магнит, закрепленный на платформе, будет проходить мимо них, преодолевая тем самым порог их срабатывания.
Сигнал от датчика также поступает на микроконтроллер, где обрабатывается, и выводиться на табло индикации. В зависимости от количества единиц будет определено расстояние выбега.
В данном проекте, одним из важнейших элементов системы является однокристальный микроконтроллер семейства AVR – ATMEL ATmega 32, изображение которого приведено на рисунке 8.
Рисунок 9 – Микроконтроллер ATMEL ATmega 32
Микроконтроллер выпускается в двух корпусах PDIP-типа и MLF-типа, при проектировке стенда, был использован микроконтроллер в PDIP корпусе. В отличие от MLF, PDIP имеет сорока выводной корпус, что на четыре вывода меньше чем у MLF. Напряжение питания микроконтроллера колеблется от 4.5 до 5.5 вольт, для удобства в дальнейшем будет использоваться среднее значение напряжения питания 5 вольт. Тактовая частота микроконтроллера лежит в диапазоне от 0 до 16 МГц, а количество циклов записи и стирания равно 100 000 циклов. Помимо функции АЦП микроконтроллер позволяет подключать внешние приборы индикации, например ЖК-дисплей, а также выводить информацию на ПК, с помощью подключаемого COM-порта. Программирование данного микроконтроллера происходит в специально разработанной среде AVR Studio.
Схема подключения микроконтроллера, а также нумерация портов изображена на рис. 10.
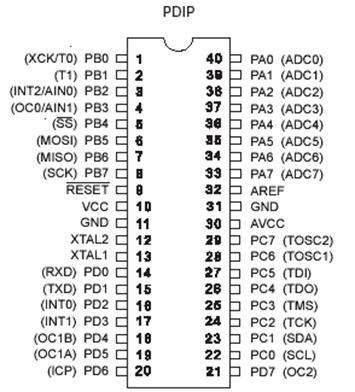
Рисунок 10 – Нумерация портов микроконтроллера
Особенностями данного микроконтроллера являются следующие характеристики:
а) развитая RISC архитектура:
- 131 исполняемых команд, большинство за один машинный
такт;
- 32 рабочих регистра общего назначения;
- полностью статический режим работы;
- производительность до 16 MIPS при 16 МГц;
- встроенный 2-х тактовый умножитель;
б) энергонезависимая память программ и данных:
- 32К байт внутрисистемно самопрограммируемой FLASH
памяти с количеством циклов перепрограммирования до 10 000;
- Опционно загрузочная область памяти с независимыми
ключевыми битами, внутрисистемное программирование встроенной загрузочной
программой, правильное чтение в процессе записи;
- 1024 байт EEPROM с допустимым количеством циклов
стирания записи до 100 000;
- 2К байт внутренней SRAM;
- программируемый ключ защиты программ
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.