Задачей данного проекта является разработать систему, которая смогла бы зафиксировать величину выбега, подъемной платформы, за границы эталонной линии, измерительная схема экспериментального стенда приведена
на рисунке 17.
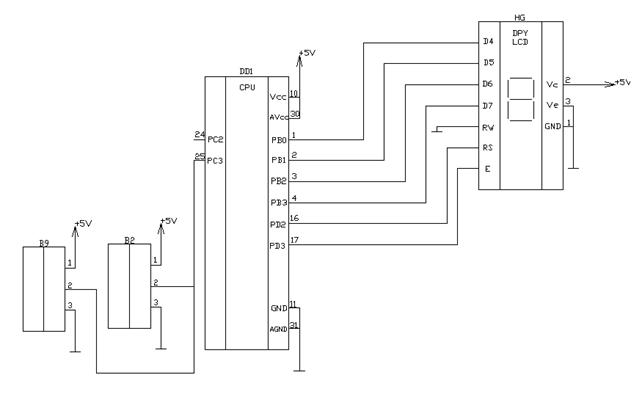
B2-B9 – Цифровые датчики Холла
DD1 – Микроконтроллер ATmega32
HG – ЖК табло на основе микроконтроллера Hitachi
Рисунок 17 – Измерительная схема экспериментального стенда
Как было сказано ранее, см. раздел 2.2 и 2.2.1, для этих целей использованы цифровые датчики Холла.
Измерительная часть схемы стенда состоит из восьми цифровых датчиков Холла, расположенных на интервале 5 мм друг от друга, причем 5 датчиков расположены ниже эталонной линии останова, а 3 датчика выше, для того, чтобы фиксировать выбег подъемной платформы, как при спуске, так и при подъеме.
Если магнит, закрепленный на кабине подъемника, оказывается вблизи датчика, и его магнитное поле преодолевает порог срабатывания в 60 Гауссов, цифровой датчик на выходе формирует сигнал «1», что соответствует погрешности в 5 мм.
Сигнал от датчиков поступает на вход главного микроконтроллера ATmega32, где после выполнения специально разработанного алгоритма, преобразованный сигнал поступает на вспомогательный микроконтроллер ЖК индикатора, который преобразует полученный ASCII код, в символьные обозначения. Набор символов изначально запрограммирован в памяти вспомогательного микроконтроллера.
После чего происходит вывод информации на дисплей ЖК индикатора.
С помощью кнопок S1 и S2 устанавливается скорость движения подъемной кабины. Сигнал в виде двоичного кода поступает на главный микроконтроллер Atmega32, где обрабатывается и в виде ASCII кода поступает на вспомогательный микроконтроллер Hitachi, с помощью которого на дисплей ЖК индикатора выводиться численное значение заданной скорости.
Сигнал заданной скорости, проходя через оптореле К293КП11АП, усиливается и поступает на вход электродвигателя постоянного тока Pololu Robotics and Electronics. Двигатель начитает работу, редуктор, совмещенный с валом двигателя прикреплен к валу намоточной катушки, на которой располагается трос, поднимающий и опускающий подвижную платформу.
Для того чтобы остановить платформу использован цифровой датчик Холла SS411A и постоянный магнит прикрепленный на подвижную платформу. При прохождении подвижной платформы мимо датчика Холла, магнитное поле постоянного магнита преодолевает порог срабатывания датчика, который на выходе сформирует сигнал остановки «1» и посылает его на главный микроконтроллер.
Обработанный сигнал, через оптореле поступает на вход двигателя, после чего происходит его постепенная остановка. В зависимости от скорости и массы груза расстояние которое проходит кабина не всегда одинакова, для того чтобы измерить величину этого расстояния или выбега, используются восемь цифровых датчиков Холла SS411A.
Датчики Холла также закреплены внутри шахты, пять датчиков закреплены ниже эталонной линии остановки и еще три датчика выше линии остановки. Это сделано для того чтобы измерять величину выбега, как при спуске, так и при подъеме. Интервал между датчиками 5 миллиметров.
Если кабина, останавливаясь, пересекает эталонную линию остановки более чем на 5 миллиметров, срабатывает цифровой датчик Холла, формируя сигнал «1». Сигналы поступают на вход микроконтроллера ATmega32, обрабатываются и в виде ASCII кода поступают на микроконтроллер Hitachi, который выводит на дисплей численное значение величины выбега подъемной платформы.
Данный экспериментальный стенд позволит наглядно продемонстрировать возникающие погрешности позиционирования подъемных механизмов, в зависимости от массы груза и заданной скорости движения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.