4 ТЕОРІЯ ПОЛЯ
4.1 Основні поняття теорії поля
Теорія поля – розділ математики, в якому вивчаються скалярні, векторні, тензорні поля.
До розгляду скалярних і векторних полів приводять багато задач фізики, електротехніки, математики, механіки та інших технічних дисциплін. Вивчення одних фізичних полів сприяє вивченню й інших. Так, наприклад, сили всесвітнього тяжіння, магнітні, електричні сили — всі вони змінюються обернено пропорційно до квадрата відстані від свого джерела; вид силових магнітних ліній нагадує картину обтікання перешкод рідиною та ін.
Основними в теорії поля є такі поняття, як градієнт, потік, потенціал, дивергенція, ротор, циркуляція . Ці поняття важливі і в засвоєнні основних ідей математичного аналізу функцій багатьох змінних.
Полем називається область V простору, в кожній точці якої визначено значення деякої величини. Якщо кожній точці М цієї області відповідає певне число U = U(M), говорять, що в області визначено (задано) скалярне поле (або функція точки). Інакше кажучи, скалярне поле — це скалярна функція U(M) разом з її областю визначення. Якщо ж кожній точці М області простору відповідає деякий вектор а = а(М), то говорять, що задано векторне поле (або векторна функція точки).
Прикладами скалярних полів можуть бути поля температури (повітря, тіла ...), атмосферного тиску, густини (маси, повітря ...), електричного потенціалу та ін.. Прикладами векторних полів є поле сили ваги, поле швидкостей частинок поточної рідини (вітру), магнітне поле, поле густини електричного струму та ін..
Якщо функція U(M) не залежить від часу, то скалярне (векторне) поле називається стаціонарним ;поле, яке міняється з часом (міняється, наприклад, скалярне поле температури при охолоджуванні тіла), називається нестаціонарним .
Далі розглядатимемо тільки стаціонарні поля.
Якщо V — область тривимірного простору, то скалярне поле U можна розглядати як функцію трьох змінних х, у, z (координат точки М).
U = U(x;y;z).
Якщо скалярна функція U(M) залежить тільки від двох змінних, наприклад х і у, то відповідне скалярне поле U(x; у) називають плоским.
Аналогічно: вектор а = а(М),що визначаючає векторне поле, можна розглядати як векторну функцію трьох скалярних аргументів х, у і z: а = а(х; у; z) .
Вектор а = а(М) можна подати (розклавши його за ортами координатних осей) у вигляді
а = Р(х; у; z) i + Q(x; у; z) J + R(x; у; z) k,
де Р(х; у; z), Q(x; у; z), R,(x\ у; z) — проекції вектора а(М) на осі координат. Якщо у вибраній системі координат Oxyz одна з проекцій вектора а = а(М) дорівнює нулю, а дві інші залежать тільки від двох змінних, те векторне поле називається плоским. Наприклад, а = P(x;y) i + Q(x;y) j.
.
4.2 Скалярне поле
4.2.1 Поверхні та лінії рівня
Розглянемо скалярне поле, що задається функцією U = U(x;y;z). Для наочного представлення скалярного поля використовують поверхні та лінії рівня.
Поверхнею рівня скалярного поля називається геометричне місце точок, в яких функція U(M) набуває постійного значення, тобто
U(x;y;z)= С.
Задаючи у цій
рівності величині С різні значення, одержимо різні поверхні рівня, які в
сукупності ніби розшаровують поле. Через кожну точку поля проходить тільки одна
поверхня рівня. Її рівняння можна знайти шляхом підстановки координат точки в
рівняння ![]() .
.
Для скалярного
поля, утвореного функцією U=![]() поверхнями рівня є безліч концентричних сфер
з центрами у початку координат:
поверхнями рівня є безліч концентричних сфер
з центрами у початку координат: ![]() = С. Зокрема, якщо С=1, отримаємо
= С. Зокрема, якщо С=1, отримаємо ![]() = 0, тобто сфера
стягується в точку.
= 0, тобто сфера
стягується в точку.
У разі плоского поля U = U(x; у) рівність U(x; у)= С є рівнянням лінії рівня поля, тобто лінія рівня —
це лінія на площині Оху, в точках якої функція U(x;y) зберігає постійне значення. |
В метеорології, наприклад, мережі ізобар та ізотерм (лінії однакового середнього тиску та однакових середніх температур) є лініями рівня та функціями координат точок місцевості.
Лінії рівня застосовуються в математиці при дослідженні поверхонь методом перетинів.
4.2.2 Похідна за напрямом
Для характеристики швидкості зміни поля U=U(Р) в заданому напрямку введемо поняття «похідної за напрямом».
Нехай задано
скалярне поле U=U(x,y,z). Візьмемо в полі точку P(x,y,z) та промінь, що з неї
виходить. Вектор ![]() утворює з осями ОХ, ОY, OZ
відповідно кути
утворює з осями ОХ, ОY, OZ
відповідно кути ![]() . Якщо
. Якщо ![]() =(lх, lу, lz), то направляючі
косинуси вектора будуть
=(lх, lу, lz), то направляючі
косинуси вектора будуть![]() такими:
такими:
 ,
,  ,
,
 .
.
Одиничний вектор![]()
 .
.
Рисунок 4.1
Візьмемо точку Р![]() (x
(x![]() ,y
,y![]() ,z
,z![]() ), що лежить на промені
), що лежить на промені ![]() . Проекції вектора
. Проекції вектора ![]() на осі координат будуть
на осі координат будуть ![]() , де
, де ![]() .
.![]() Врахуємо, що
Врахуємо, що ![]() =(х
=(х![]() -х, y
-х, y![]() -y, z
-y, z![]() -z). Отже:
-z). Отже:
 або
або 
Тоді приріст функції U при переході з точки Р в точку Р1 буде:

Оскільки повний приріст функції
 ,
,
де ![]() - нескінченно мала величина більш
високого порядку, ніж
- нескінченно мала величина більш
високого порядку, ніж ![]() . Якщо
. Якщо ![]() ,
, ![]() ,
,
![]() , то
, то
_
 ,
,
де  .
.
Тоді
Отримали формулу для обчислення похідної за напрямом.
У разі плоского
поля U=U(x,y) маємо![]()
Зауваження. Поняття похідної за напрямом
є узагальненням поняття частинних похідних ![]() ,
, ![]() ,
, ![]() . Їх можна розглядати як похідні від функції
і за напрямами координатних осей Ох, Оу і Oz. Так, якщо напрям l співпадає з
додатним напрямом осі Ох, то, прийнявши
. Їх можна розглядати як похідні від функції
і за напрямами координатних осей Ох, Оу і Oz. Так, якщо напрям l співпадає з
додатним напрямом осі Ох, то, прийнявши  , отримаємо
, отримаємо  .
.
Приклад 4.1
Обчислити похідну
функції U=ln(6x+7y) у точці М(-2;2) у напрямі вектора ММ![]() , де М
, де М![]() (2;-1)
(2;-1)
Рішення
Знайдемо вектор
ММ![]() =(4;-3).
=(4;-3). ![]()
![]() .
Знайдемо cos
.
Знайдемо cos![]() =
=![]() , cos
, cos  .
.
Обчислимо частинні похідні у точці М(-2;2):
 . Звідси
. Звідси
 . Знайдемо
. Знайдемо  .
.
Отже, дана
функція в точці М зростає в напрямі ММ![]() зі швидкістю 0,3.
зі швидкістю 0,3.
4.2.3 Градієнт та його властивості
Градієнтом поля називається вектор, проекції якого є значення частинних похідних функції, тобто
 .
.
Напрям
градієнта функції U(x,y,z) в кожній точці співпадає з напрямом
нормалі до поверхні рівня скалярного поля, що проходить через цю точку,
оскільки рівняння нормалі до поверхні рівня в точці ![]() :
:
 .
.
Градієнт направлений по нормалі до поверхні рівня (або до лінії рівня, якщо поле пласке).
Градієнт направлений у бік зростання функції поля.
Наведемо деякі властивості градієнта:
1) ![]() .
.
2) ![]() .
.
3) ![]() .
.
4) ![]() .
.
Приклад 4.2
Знайти величину і напрям градієнта поля U=x![]() +2y
+2y![]() +3z
+3z![]() +xy+3x-2y-6z в точці В (2,0,1). В якій
точці градієнт поля дорівнює нулю?
+xy+3x-2y-6z в точці В (2,0,1). В якій
точці градієнт поля дорівнює нулю?
Рішення. Згідно з визначенням градієнта маємо:
grad U= =(2x+y+3; 4y+x-2; 6z-6).
=(2x+y+3; 4y+x-2; 6z-6).
grad U(B)=(7;0;0).
Прирівняємо значення градієнта функції до нуля і знайдемо точку, в якій градієнт обертається в нуль: 2х+у+3=0; 4у+х-2=0; 6z-6=0. Звідси z=1, y=1, x=-2, тобто grad U=0, де М(-2;1;1).
4.3 Векторне поле
4.3.1 Векторні лінії поля
Розглянемо
векторне поле, що задається вектором ![]() =
= ![]() {М). Вивчення поля зручно починати з поняття
векторних ліній; вони є найпростішими геометричними характеристиками поля
Векторною лінією поля
{М). Вивчення поля зручно починати з поняття
векторних ліній; вони є найпростішими геометричними характеристиками поля
Векторною лінією поля ![]() називається
лінія, дотична до якої в кожній її точці М має напрям відповідного їй вектора
називається
лінія, дотична до якої в кожній її точці М має напрям відповідного їй вектора ![]() (М).
(М).
Це поняття для конкретних полів має ясний фізичний сенс. Наприклад, в полі швидкостей поточної рідини векторними лініями будуть лінії, вздовж яких рухаються частинки рідини (лінії струму); для магнітного поля векторними (силовими) лініями будуть лінії, що виходять з північного полюса і закінчуються в південному.
Сукупність всіх векторних ліній поля, що проходять через деяку замкнуту криву, називається векторною трубкою.
Вивчення векторного поля звичайно починають з вивчення розташування його векторних ліній. Векторні лінії поля
описуються системою диференціальних рівнянь виду
 (4.1)
(4.1)
Дійсно, нехай
PQ — векторна лінія поля, ![]() = xi+yj+zk- її радіус-вектор. Тоді вектор dr =
dx i + dy j + dz k має напрям дотичної до лінії PQ в
точці М (див. рис. 4.2).
= xi+yj+zk- її радіус-вектор. Тоді вектор dr =
dx i + dy j + dz k має напрям дотичної до лінії PQ в
точці М (див. рис. 4.2).
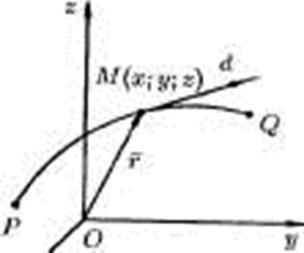
Рисунок 4.2
З колінеарності
векторів ![]() і dr випливає пропорційність їх
проекцій, тобто рівність (4.1).
і dr випливає пропорційність їх
проекцій, тобто рівність (4.1).
Приклад 4.3
Знайти векторні лінії поля а=(y+z)i – xj – xk.
Рішення
Згідно до (4.1) маємо:
 або
або  .
.
З першого рівняння системи отримуємо:
y-z=c, де с –
довільна стала. Згідно рівності dy=dz, з другого рівняння системи знаходимо (xdx+ydy+zdz=0)
або (x![]() +y
+y![]() +z
+z![]() =R
=R![]() ), де R – стала.
), де R – стала.
Таким чином,
рівняннями векторних ліній є лінії перетину сфер x![]() +y
+y![]() +z
+z![]() =R
=R![]() та паралельних площин y-z=c, тобто кола.
та паралельних площин y-z=c, тобто кола.
4.3.2 Потік векторного поля
Нехай векторне поле утворено вектором
а = Р(х; у; z) l + Q(x; у; z) j + R(x; у; z) к.
Для наочності вважатимемо а(М) вектором швидкості деякого потоку рідини, що рухається стаціонарно. Уявимо, що деяка поверхня S знаходиться в цьому потоці і пропускає рідину. Підрахуємо, кількість рідини що, протікає через поверхню S.
Виберемо певну
сторону поверхні S. Нехай п = (cos ![]() ; cos
; cos ![]() ; cos
; cos ![]() ) — одиничний вектор нормалі до даної сторони
поверхні S. Розіб'ємо поверхню на елементарні майданчики Si , S2 , , Sn.
Виберемо в кожному майданчику точку М
) — одиничний вектор нормалі до даної сторони
поверхні S. Розіб'ємо поверхню на елементарні майданчики Si , S2 , , Sn.
Виберемо в кожному майданчику точку М![]()
![]() (i =1,2..., п) (див. рис. 4.3) і обчислимо
значення вектора швидкості а(М) в кожній точці: а{М
(i =1,2..., п) (див. рис. 4.3) і обчислимо
значення вектора швидкості а(М) в кожній точці: а{М![]() ), а(М
), а(М![]() ), , а(М
), , а(М![]() ).
).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.