









Увеличение требований к качеству ведения технологического процесса обуславливает широкое внедрение микропроцессорных систем автоматического регулирования различной степени сложности. Значительное место среди них занимают контроллеры, которые обеспечивают выполнение задач автоматического регулирования.
В рассматриваемом технологическом процессе осуществляется регулирование уровня в дополнительном баке (лист АПП.000001.052.А2).
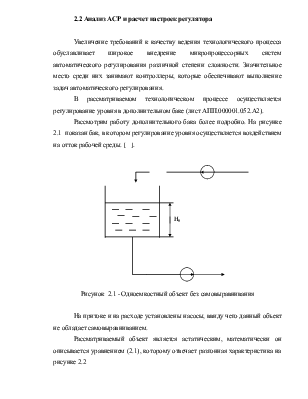
Рассмотрим работу дополнительного бака более подробно. На рисунке 2.1 показан бак, в котором регулирование уровня осуществляется воздействием на отток рабочей среды. [ ].
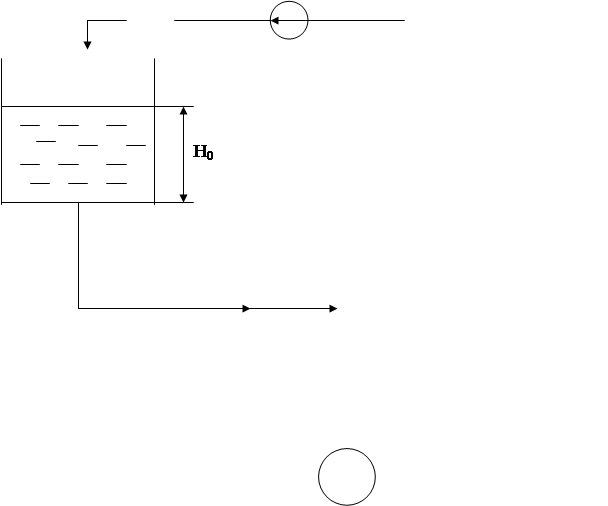 |
Рисунок 2.1 - Одноемкостный объект без самовыравнивания
На притоке и на расходе установлены насосы, ввиду чего данный объект не обладает самовыравниванием.
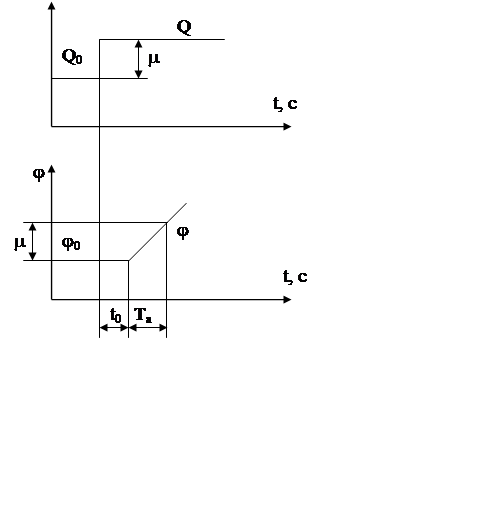
Рассматриваемый объект является астатическим, математически он описывается уравнением (2.1), которому отвечает разгонная характеристика на рисунке 2.2
 ,
(2.1)
,
(2.1)
где Та – условная постоянная времени разгона объекта, с;
l - относительная величина возмущающего воздействия;
j - относительная величина регулируемого параметра;
|
 |
 ,
(2.2)
,
(2.2)
где F – поперечное сечение бака, м2;
Qmax – максимальное значение расхода, м3/с;
H0 – номинальное значение уровня жидкости в баке, м.
Подставляем параметры технологического процесса в формулу (2.2), получаем:
 с
с
Время транспортного запаздывания находим по формуле:
t0=0,05*Та , (2.3)
t0=0,05*30=1,5 с
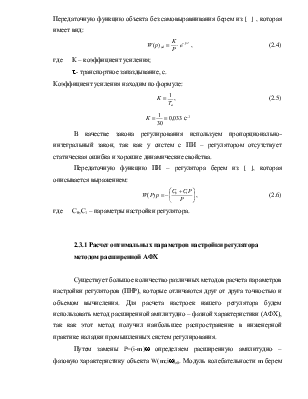
Передаточную функцию объекта без самовыравнивания берем из [ ] , которая имеет вид:
 , (2.4)
, (2.4)
где К – коэффициент усиления;
t - транспортное запаздывание, с.
Коэффициент усиления находим по формуле:
 ,
(2.5)
,
(2.5)
 с-1
с-1
В качестве закона регулирования используем пропорционально-интегральный закон, так как у систем с ПИ – регулятором отсутствует статическая ошибка и хорошие динамические свойства.
Передаточную функцию ПИ – регулятора берем из [ ], которая описывается выражением:
 ,
(2.6)
,
(2.6)
где С0,С1 – параметры настройки регулятора.
Путем замены P=(i-m)w определяем расширенную амплитудно – фазовую характеристику объекта W(m;iw)об. Модуль колебательности m берем из [ ]: m=0,221. Данному значению модуля соответствует степень затухания y=0,75, которую также берем из [ ].
После замены Р на (i-m)w расширенная АФХ объекта примет вид:
 ,
(2.7)
,
(2.7)
Разлагаем расширенную АФХ на действительную и мнимую части:

 (2.8)
(2.8)
Так как е-iwt = coswt-sinwt, то выражение (2.8) примет вид:

 .
.
 ,
(2.9)
,
(2.9)
 ,
(2.10)
,
(2.10)
Проводим замену Р на (i-m)w для определения АФХ регулятора W(m,iw)p.

 ,
(2.11)
,
(2.11)
Из выражения (2.11) выделяем вещественную и мнимую части:
 ,
(2.12)
,
(2.12)
 .
(2.13)
.
(2.13)
Вещественная и мнимая части регулятора в зависимости от m,w,С0,С1 имеют соответственно вид:
 ,
(2.14)
,
(2.14)
 .
(2.15)
.
(2.15)
Приравниваем выражения (2.14) и (2.15) к выражениям (2.9) и (2.10) соответственно, получаем:



 .
.
Таким образом вещественная часть регулятора описывается выражением:
 .
(2.16)
.
(2.16)
Находим мнимую часть регулятора:


 .
(2.17)
.
(2.17)
Приравняем выражения (2.13) и (2.17), получаем:
 ,
,
Из уравнения (2.18) выделяем параметр настройки регулятора С0:
 .
(2.18)
.
(2.18)
Приравниваем выражения (2.12) и (2.16), получаем:
 ,
,
 ,
,
 ,
,
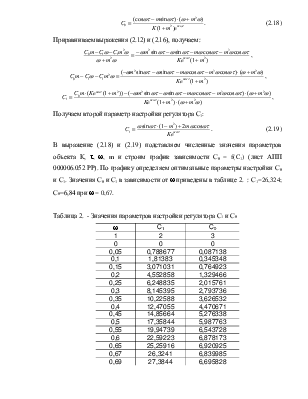
Получаем второй параметр настройки регулятора С1:
 .
(2.19)
.
(2.19)
В выражение (2.18) и (2.19) подставляем численные значения параметров объекта К, t, w, m и строим график зависимости С0 = f(C1) (лист АПП 000006.052 РР). По графику определяем оптимальные параметры настройки С0 и С1. Значения С0 и С1 в зависимости от w приведены в таблице 2. : С1=26,324; С0=6,84 при w = 0,67.
Таблица 2. - Значения параметров настройки регулятора С1 и С0
|
w |
C1 |
C0 |
|
|
1 |
2 |
3 |
|
|
0 |
0 |
0 |
|
|
0,05 |
0,788677 |
0,087138 |
|
|
0,1 |
1,81383 |
0,345348 |
|
|
0,15 |
3,071031 |
0,764923 |
|
|
0,2 |
4,552858 |
1,329466 |
|
|
0,25 |
6,248835 |
2,015761 |
|
|
0,3 |
8,145395 |
2,793736 |
|
|
0,35 |
10,22588 |
3,626532 |
|
|
0,4 |
12,47055 |
4,470671 |
|
|
0,45 |
14,85664 |
5,276338 |
|
|
0,5 |
17,35844 |
5,987763 |
|
|
0,55 |
19,94739 |
6,543728 |
|
|
0,6 |
22,59223 |
6,878173 |
|
|
0,65 |
25,25916 |
6,920925 |
|
|
0,67 |
26,3241 |
6,839985 |
|
|
0,69 |
27,3844 |
6,695828 |
|
|
Продолжение таблицы 2. |
|||
|
1 |
2 |
3 |
|
|
0,7 |
27,91204 |
6,598522 |
|
|
0,75 |
30,51262 |
5,835159 |
|
|
0,8 |
33,02079 |
4,553715 |
|
|
0,85 |
35,39486 |
2,676893 |
|
|
0,9 |
37,5919 |
0,128429 |
|
|
0,91 |
38,00622 |
-0,46842 |
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.