




















Между духом и материей
посредничает математика.
Хуго Штейнхаус
ПЛАН
1. Введение.
2. Декартова система координат.
3. Полярная система координат.
4. Элементы векторной алгебры.
5. Скалярное произведение векторов
6. Заключение.
- Дайте мне точку опоры, и я переверну весь мир, – мечтал Архимед в 250 году до нашей эры в Греции.
- Дайте мне универсальный язык, и я опишу весь мир, – мечтал Рено Декарт в1619 году во Франции.
Весь мир для них состоял из предметов и сил, которые приводили эти предметы в движение. Числа и силы, разъединенные физикой и математикой, были мало связаны между собой. Для того чтобы связать их, нужен был новый язык, простой и ясный, который был одинаково понятен всем, кто имеет дело с числами и их изменениями.
Мечта Декарта сбылась. Он нашел универсальный язык, на котором с тех пор говорит весь математический и физический анализ, – язык отвлеченных формул, каждая из которых при внешней похожести может описывать различные явления.
А все началось с оси действительных чисел, на которую Декарт поместил все известные и неизвестные (отрицательные и иррациональные) числа. Каждой точке на этой оси соответствовало свое число. Чем больше абсолютная величина числа – тем дальше находится оно от начала координат.Длина отрезка, заключенного между двумя точками, определяется как разность координат его концевых точек:
![]() .
.
Определенный таким образом отрезок можно было делить пополам, и координата середины отрезка определялось как среднее его координат, т.е.
 .
(6.1)
.
(6.1)
Если
отрезок АВ внутренней точкой С делится в соотношении  , то координаты точки С
находятся из решения уравнения
, то координаты точки С
находятся из решения уравнения  , откуда
, откуда
 . (6.2)
. (6.2)
Пример 6.1. Найти координаты середины отрезка АВ, если точка А отстоит вправо от начала координат на 5 ед., а точка В – на 13 ед., а также координаты точки K, делящий отрезок в отношении 1:7.
Решение. Воспользуемся выше данными формулами:
 ,
,  .
.
На эту же ось можно было проецировать силы –
направленные отрезки, которые назывались векторы. Векторы
обозначаются символами АВ, ![]() ,
, ![]() . В первых двух случаях начало
вектора находится в точке А, конец – в точке В, в третьем случае
начало вектора находится в любой точке (рис. 6.1).
. В первых двух случаях начало
вектора находится в точке А, конец – в точке В, в третьем случае
начало вектора находится в любой точке (рис. 6.1).
И вновь число, равное разности координат его начала и конца, однозначно характеризовало почти все векторы. Это число называлось проекцией вектора на ось.
![]() (6.3)
(6.3)
Эту формулу вы помните из школы.
По заданной проекции и углу между вектором и положительным направлением оси OL можно было найти модуль вектора или его длину.
 ,
(6.4)
,
(6.4)
откуда
 .
.
Если угол между вектором и осью был острый – проекция считалась положительной, если тупой – отрицательной. Но если вектор был перпендикулярен оси – его проекция становилась равной нулю, и восстановить его модуль было невозможно. Такие векторы либо выпадали из рассмотрения, либо для них нужно было ввести дополнительную ось.
И Декарт ввел ее. Две взаимно перпендикулярные оси, выходящие из одной точки – нуля (начала), как две скрещенные шпаги, разделили плоскость на четыре части. Он назвал их Системой координат, а части квадрантами, или четвертями.
Теперь каждая точка на плоскости, а потом и в
пространстве могла быть «привязана» к системе. Эти «привязки» назывались
координатами точки ![]() в декартовой системе
координат. Координаты однозначно определяли положение точки на плоскости. Например,
точка
в декартовой системе
координат. Координаты однозначно определяли положение точки на плоскости. Например,
точка ![]() находится в III четверти,
находится в III четверти, ![]() ,
, ![]() и
т.д.
и
т.д.
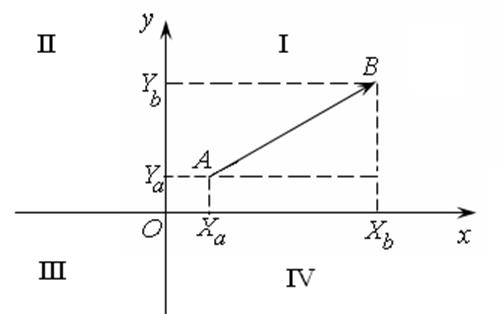
Рис. 6.2. Декартова система координат
Как только точки получили свои координаты, – сразу
стало возможно определить между ними расстояние. Если точки А и В
имели координаты ![]() и
и ![]() соответственно,
то расстояние между ними определялось по теореме Пифагора (рис. 6.2). Это была
первая формула, связывающая координаты воедино.
соответственно,
то расстояние между ними определялось по теореме Пифагора (рис. 6.2). Это была
первая формула, связывающая координаты воедино.
 . (6.5)
. (6.5)
Формулы для середины отрезка и для пропорциональных отрезков не изменились, к ним просто добавилась вторая координата:
 (6.6)
(6.6)
Формула (6.5) могла определить и модуль вектора (или его длину), если известны координаты начала и конца. В новой системе не было запрета на перпендикулярные векторы, как в случае с одной осью. Перпендикулярные одной, они были параллельны другой, и их модули определялись однозначно. Так родилась новая наука, объектами изучения которой являлись векторы. Она называется векторным анализом. В нашем случае рассмотрение этой темы носит ознакомительный характер. Желающие приобрести более глубокие знания могут обратиться к любому учебнику из списка рекомендованной литературы.
 |
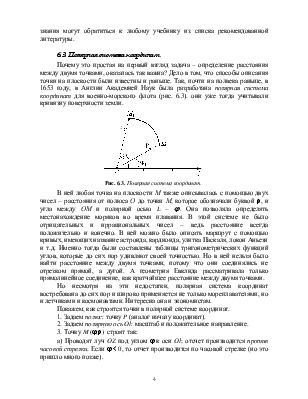
В ней любая точка на плоскости М также
описывалась с помощью двух чисел – расстояния от полюса О до точки М,
которое обозначали буквой r, и угла между ОМ
и полярной осью L – ![]() . Она позволяла определять местонахождение
моряков во время плавания. В этой системе не было отрицательных и иррациональных
чисел – ведь расстояние всегда положительно и конечно. В ней можно было описать
маршрут с помощью кривых, имеющих название астроида, кардиоида, улитка Паскаля,
локон Аньези и т.д. Именно тогда были составлены таблицы тригонометрических
функций углов, которые до сих пор удивляют своей точностью. Но в ней нельзя
было найти расстояние между двумя точками, потому что они соединялись не
отрезком прямой, а дугой. А геометрия Евклида рассматривала только
прямолинейное соединение, как кратчайшее расстояние между двумя точками.
. Она позволяла определять местонахождение
моряков во время плавания. В этой системе не было отрицательных и иррациональных
чисел – ведь расстояние всегда положительно и конечно. В ней можно было описать
маршрут с помощью кривых, имеющих название астроида, кардиоида, улитка Паскаля,
локон Аньези и т.д. Именно тогда были составлены таблицы тригонометрических
функций углов, которые до сих пор удивляют своей точностью. Но в ней нельзя
было найти расстояние между двумя точками, потому что они соединялись не
отрезком прямой, а дугой. А геометрия Евклида рассматривала только
прямолинейное соединение, как кратчайшее расстояние между двумя точками.
Но несмотря на эти недостатки, полярная система координат востребована до сих пор и широко применяется не только мореплавателями, но и летчиками и космонавтами. Интересна она и экономистам.
Покажем, как строятся точки в полярной системе координат.
1. Задаем полюс: точку P (аналог началу координат).
2. Задаем полярную ось Ol: масштаб и положительное направление.
3. Точку ![]() строят так:
строят так:
а) Проводят луч OZ
под углом j к оси Ol;
отсчет производится против часовой стрелки. Если ![]() ,
то отчет производится по часовой стрелке (но это пришло много позже).
,
то отчет производится по часовой стрелке (но это пришло много позже).
б) На луче OZ откладывают расстояние r в единицах масштаба полярной оси.
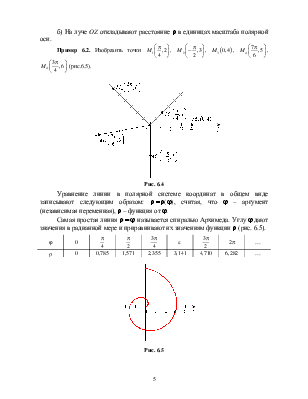
Пример 6.2.
Изобразить точки  ,
,  ,
,
![]() ,
,  ,
,
 (рис.6.5).
(рис.6.5).
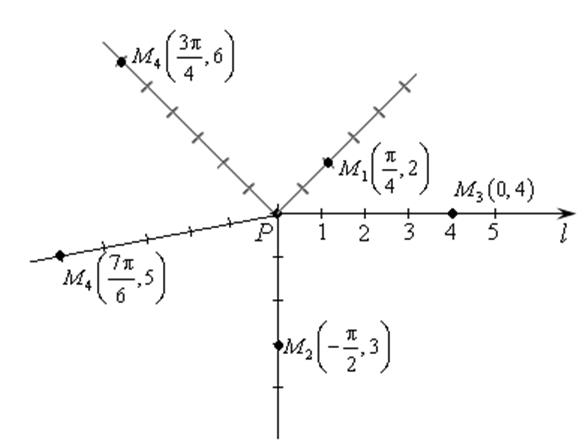
Рис. 6.4
Уравнение линии в полярной системе координат в общем
виде записывают следующим образом: ![]() , считая, что j –
аргумент (независимая переменная), r – функция от
j.
, считая, что j –
аргумент (независимая переменная), r – функция от
j.
Самая простая линия ![]() называется спиралью Архимеда. Углу j дают
значения в радианной мере и приравнивают их значениям функции r (рис. 6.5).
называется спиралью Архимеда. Углу j дают
значения в радианной мере и приравнивают их значениям функции r (рис. 6.5).
|
j |
0 |
|
|
|
|
|
|
… |
|
r |
0 |
0,785 |
1,571 |
2,355 |
3,141 |
4,710 |
6,282 |
… |
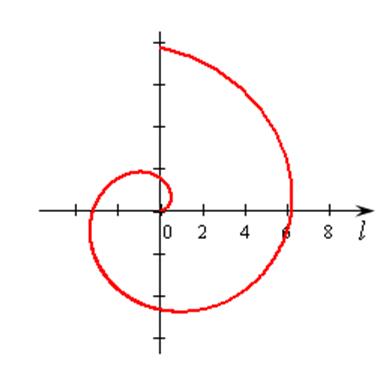
Рис. 6.5
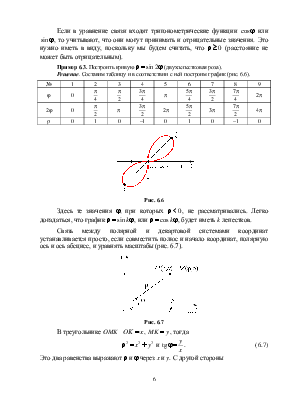
Если в уравнение связи входят тригонометрические
функции ![]() или
или ![]() ,
то учитывают, что они могут принимать и отрицательные значения. Это нужно иметь
в виду, поскольку мы будем считать, что
,
то учитывают, что они могут принимать и отрицательные значения. Это нужно иметь
в виду, поскольку мы будем считать, что ![]() (расстояние
не может быть отрицательным).
(расстояние
не может быть отрицательным).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.