ИрГУПС
ЗабИЖТ
Выполнил Проверил: Овсейчик С. З.
студент группы ЭПС-51
содержание
Введение
1. Алгоритм управления и функциональная схема
системы автоматического пуска электропоезда
2. Статические характеристики тягового двигателя
и сопротивление пускового реостата
3. Исходная пусковая диаграмма и последовательность
работы системы управления электропоезда
4. Динамические характеристики цепи тяговых двигателей
5. динамические характеристики электрических аппаратов
системы
6. Анализ работы системы при реостатном регулировании
7. Анализ работы системы при регулировании возбуждения
8. Анализ работы системы при перегруппировке
двигателей и выключении шунтирующих цепей.
реализуемая пусковая диаграмма
9. Анализ влияния технического состояния оборудования
на качество регулирования
Заключение
Список литературы
1. Алгоритм управления и функциональная схема системы
автоматического пуска электропоезда.
Система автоматического пуска представляет собой замкнутую
многоканальную, ступенчатую систему автоматического регулирования тока тяговых электродвигателей, в которой используется принцип регулирования по отклонению.
Укрупненная функциональная схема системы приведена на рисунке 1.
В процессе разгона поезда по мере увеличения скорости его движения происходит постепенное уменьшение тока тяговых двигателей I. При снижении тока до заданной величины Iy (элемент сравнения текущего и заданного значения тока показан на рисунке 1 в виде окружности, разделенной на секторы) подается управляющее воздействие, которое приводит к увеличению тока тяговых электродвигателей. После того как ток опять снизится до величины Iy , подается следующее управляющее воздействие, ток опять возрастает и так далее.
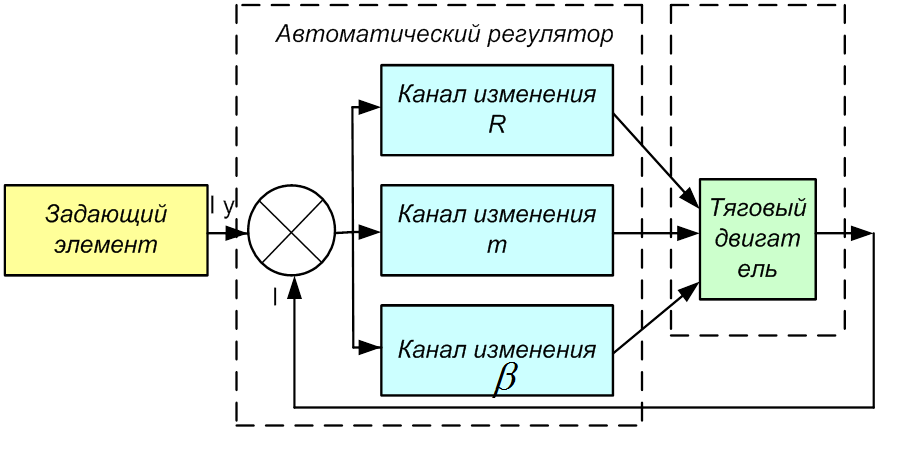
Рисунок 1. Укрупненная функциональная схема системы.
Воздействие на величину тока тяговых двигателей
производится путем изменения сопротивления пускового реостата R,
изменения коэффициента регулирования возбуждения ![]() ,
а также путем изменения числа последовательно соединенных двигателей т с
одновременным введением сопротивления в цепь двигателей. Последовательность
работы соответствующих управляющих каналов регулятора, показанных на рисунке 1,
определяется заложенным в системе алгоритмом управления.
,
а также путем изменения числа последовательно соединенных двигателей т с
одновременным введением сопротивления в цепь двигателей. Последовательность
работы соответствующих управляющих каналов регулятора, показанных на рисунке 1,
определяется заложенным в системе алгоритмом управления.
В теории управления алгоритмом принято называть совокупность преобразований и логических условий, действующих в определенном порядке. Применительно к заданной силовой схеме (рис.2) таким алгоритмом является таблица замыкания контакторов с указанием величины параметров, которые меняются в процессе управления (табл.1).
|
№ |
Контакторы |
Параметры |
||||||||||||||||||
|
линейные |
Реостатные |
Ослаб. возбуж. |
т |
|
R |
|||||||||||||||
|
ЛК1 |
ЛК2 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|||||||
|
1 |
* |
* |
* |
* |
* |
* |
* |
|||||||||||||
|
2 |
* |
* |
* |
* |
* |
|||||||||||||||
|
3 |
* |
* |
* |
* |
* |
* |
||||||||||||||
|
4 |
* |
* |
* |
* |
* |
* |
* |
|||||||||||||
|
5 |
* |
* |
* |
* |
* |
* |
* |
|||||||||||||
|
6 |
* |
* |
* |
* |
* |
* |
* |
|||||||||||||
|
7 |
* |
* |
* |
* |
* |
* |
* |
|||||||||||||
|
8 |
* |
* |
* |
* |
||||||||||||||||
|
9 |
* |
* |
* |
* |
||||||||||||||||
|
10 |
* |
* |
* |
* |
* |
* |
||||||||||||||
|
11 |
* |
* |
* |
* |
* |
* |
* |
* |
||||||||||||
|
12 |
* |
* |
* |
* |
* |
* |
* |
* |
||||||||||||
|
13 |
* |
* |
* |
* |
* |
* |
* |
* |
* |
|||||||||||
|
14 |
* |
* |
* |
* |
* |
* |
* |
* |
* |
|||||||||||
|
15 |
* |
* |
* |
* |
* |
* |
* |
* |
* |
|||||||||||
|
16 |
* |
* |
* |
* |
* |
* |
* |
* |
* |
|||||||||||
|
17 |
* |
* |
* |
* |
* |
* |
* |
* |
||||||||||||
|
18 |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
||||||||||
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.