Примечание: 1 – 11 позиции, включение последовательное;
12 – 18 позиции, включение параллельное.
На рисунке 3 представлена упрощенная принципиальная схема цепей управления. Контролер машиниста устанавливается в 4 положение. При этом происходит разгон электропоезда с выходом на вторую ступень ослабления возбуждения при параллельном соединении двигателей. Частичные алгоритмы задаются положениями М, 1, 2, 3.
2. Статические характеристики тягового двигателя
и сопротивление пускового реостата.
Статические характеристики выражают связь между входной и выходной величинами в установившемся режиме, к статическим характеристикам тягового двигателя относятся скоростные V(I) и зависимость магнитного потока от тока возбуждения Ф(Iв).
При равной степени насыщения магнитной системы тягового двигателя различных мощностей имеют примерно одинаковую форму скоростных характеристик. Такие характеристики, выраженные в относительных величинах, принято называть универсальными.
Для расчета характеристик двигателя в абсолютных
единицах в первую очередь необходимо определить номинальные значения тока. Для
расчета номинального тока номинальное напряжение на тяговом двигателе
принимается UДН
= 1500 В, а коэффициент полезного действия двигателя ![]() н
= 0,9.
н
= 0,9.
Номинальный ток находится по формуле
 (2.1.)
(2.1.)
где РН – мощность на валу тягового двигателя при номинальном
режиме, РН =220 кВт.
Чтобы получить конкретные характеристики двигателя заданной мощности, необходимо относительные величины координат универсальных характеристик умножить на заданные номинальные величины. То есть получаются такие формулы
 (2.2.)
(2.2.)
 (2.3.)
(2.3.)
Расчет:
Результаты расчетов заносим в таблицу 2.
Таблица 2.
Характеристики тягового двигателя
|
Ток двигателя I/Iн |
0,8 |
1,0 |
1,3 |
1,6 |
2,0 |
2,2 |
|
Скорость движения V/Vн по позициям |
||||||
|
1 |
9 |
3 |
- |
- |
- |
- |
|
2 |
12 |
7 |
2 |
2 |
- |
- |
|
3 |
14 |
10 |
6 |
3 |
1 |
- |
|
4 |
16 |
12 |
8 |
5 |
2 |
- |
|
5 |
17 |
14 |
10 |
7 |
5 |
- |
|
6 |
18 |
15 |
12 |
10 |
7 |
- |
|
7 |
20 |
17 |
14 |
12 |
10 |
- |
|
8 |
21 |
18 |
16 |
14 |
12 |
- |
|
9 |
22 |
20 |
17 |
16 |
14 |
- |
|
10 |
24 |
21 |
19 |
16 |
- |
|
|
11 |
33 |
27 |
24 |
21 |
18 |
- |
|
12 |
43 |
33 |
16 |
7 |
- |
|
|
13 |
38 |
31 |
26 |
22 |
16 |
- |
|
14 |
41,3 |
35 |
31 |
26 |
22 |
- |
|
15 |
45 |
38 |
34 |
31 |
27 |
-- |
|
16 |
46 |
41 |
38 |
35 |
32 |
- |
|
17 |
- |
49 |
43 |
40 |
37 |
- |
|
18 |
- |
- |
49 |
45 |
41 |
39 |
|
I, A |
130 |
163 |
212 |
261 |
326 |
359 |
По данным таблицы 2 строим характеристики V(t) для всех позиций регулирования на рисунке 4.
Сопротивление реостата складывается из сопротивлений секций, включенных на каждой позиции. Сопротивление секций определяется по формуле
 (2.4.)
(2.4.)
где ( RC ) % - сопротивление секций, заданное в процентах от полного
сопротивлениереостата R1. секция а – 21,9%, секция б –
10,4%, секция в – 9,4%, секция г – 8,3%.
Ориентировочная величина сопротивления R1 определяется из условия получения тока I1 при трогании на первой позиции, когда скорость движения V = 0 км / ч, то есть R=U/I=1500/215=13.95Ом.
Секция а
Секция б
Секция в
Секция г
Таблица 4
Сопротивление секций реостата
|
Секции |
а |
б |
в |
г |
|
Rc , Ом |
1,53 |
0,73 |
0,66 |
0,58 |
3. Исходная пусковая диаграмма и последовательность
работы системы управления электропоездом.
На рисунке 5 показана функциональная схема системы управления электропоездом. Необходимая для движения поезда сила тяги создается движущимися колесными парами, которые вращаются тяговыми электрическими двигателями через редуктор.
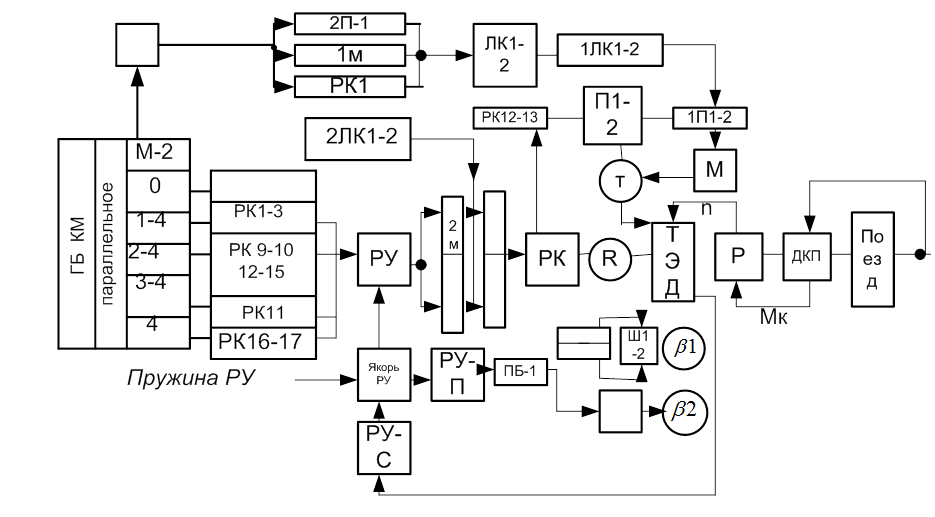
Рисунок 5. Функциональная схема системы управления электропоездом.
На рисунке 5 такие обозначения
ТЭД – тяговый электрический двигатель;
Р – редуктор ;
1ЛК1-2 – линейные контактора;
РК – контролер;
РК – катушка вентиля;
РУ-П – катушка реле ускорения;
РУ-С – силовая катушка;
РУ- ток уставки;
ДКП – движущиеся колесные пары;
КБ – контакторы безопасности.
Таблица 5.
Развертка реостатного контролера.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.