Уравнение переходного процесса, возникающего после закорачивания секции пускового реостата, можно получить путем решения уравнения электрического равновесия силовой цепи в период перехода с п – й на ( п +1) – ю позицию
 (4.1.)
(4.1.)
где Rn +1 – сопротивление реостата после закорачивания
очередной секции;
LД – индуктивность обмоток двигателя.
Точный расчет искомой функции является довольно сложным. При возрастании тока изменяются магнитный поток, сила тяги, скорость движения. Изменяется и индуктивность, которая зависит от насыщения магнитной системы двигателя. Кроме того, на изменение магнитного потока оказывают влияние возникающие в остове двигателя вихревые токи.
Текущее значение магнитного потока Ф определяется нелинейной функцией Ф(i), которую для расчетов удобно заменить зависимостью удельной ЭДС от тока двигателя СV Ф(i).
Для использования для дальнейших расчетов ее нужно линеаризировать и представить в аналитическом виде.
Линеаризированная зависимость выражается функцией
СVФ= СVФ + КФ * i (4.2.)
Где СV Ф0 – значение удельной ЭДС в точке пересечения
С осью ординат;
КФ - угловой коэффициент
![]()
Поскольку в дальнейших расчетах потребуется только угловой коэффициент КФ, его можно рассчитать аналитическим без построения кривой намагничивания. Для этого нужно вычислить приращение магнитного потока при изменении тока возбуждения от IВ1 = 1.15 IН до
IB3 = 1.45 IH указанным токам соответствуют скорости движения
V1 = 0.45 VH и V2 = 0.40 VH при работе на девятой позиции.
Тогда приращение магнитного потока определится на условии
 (4.3.)
(4.3.)
Соответствующее изменение тока будет находиться по формуле
![]() (4.4.)
(4.4.)
Если пренебречь изменением индуктивности и влиянием изменения скорости движения на величину ЭДС, то с учетом полученной линеаризованной зависимости СV Ф(i) уравнение электрического равновесия примет вид
 (4.5.)
(4.5.)
где Vнач – скорость при которой начинается переходной процесс.
Когда двигатель работает по характеристике п – й позиции его ток в момент замыкания контактора в силовой схеме соответствует току начала переходного процесса Iнач.. Процесс возрастания тока заканчивается, когда достигает значения, определяемой характеристикой последующей позиции. Ток выхода на характеристику последующей позиции называется конечным значением тока перехода In.
С учетом принятых обозначений решение уравнения (4.5.) принимает вид
 (4.6.)
(4.6.)
где ![]() -
постоянная времени цепи, с.
-
постоянная времени цепи, с.
Переходные процессы
возникающие при уменьшении ![]() , имеют гораздо
большую длительность по сравнению с переходными процессами при реостатном
регулировании. Поэтому пренебрегать изменением скорости за время перехода в
этом случае нельзя. Совместное влияние увеличения скорости на увеличение тока
якоря приводит к тому, что ЭДС тягового двигателя в течении переходного
процесса остается неизменной. Постоянная времени рассчитывается по формуле
, имеют гораздо
большую длительность по сравнению с переходными процессами при реостатном
регулировании. Поэтому пренебрегать изменением скорости за время перехода в
этом случае нельзя. Совместное влияние увеличения скорости на увеличение тока
якоря приводит к тому, что ЭДС тягового двигателя в течении переходного
процесса остается неизменной. Постоянная времени рассчитывается по формуле
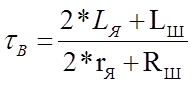 (4.7.)
(4.7.)
где rЯ – сопротивление обмотки якоря и добавочных полюсов;
RШ – сопротивление в цепи шунтирующей обмотки
возбуждения;
LЯ , LШ – индуктивность обмотки якоря и добавочных полюсов.
В курсовой работе для расчета принимаем LЯ = 0,5*La , LШ = 0,1Гн,
rЯ = 0.6*rД.
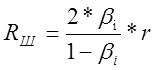
Величина RШ зависит от величины коэффициента регулирования возбуждения на i – ой ступени регулирования. То есть находится по следующей формуле
 в
(4.8.)
в
(4.8.)
Где rB = 0.4 rД =0.4*0.46 = 0.184 Ом - сопротивление обмотки
возбуждения;
![]() i –
коэффициент регулирования возбуждения на первой и второй
i –
коэффициент регулирования возбуждения на первой и второй
ступени регулирования: ![]() 1=0,67;
1=0,67;![]() 2 = 0,5.
2 = 0,5.
Расчет.
 ;
;
 ;
;
 ;
;
5. Динамические характеристики электрических
аппаратов системы.
Каждый электрический аппарат – устройство, имеющее один или несколько входов, на которые подаются управляющие воздействия, в результате которого изменяется состояние одного или нескольких выходов.
Элементы аппарата, воспринимающие воздействие – это входные, а выходы в зависимости от назначения – элементами исполнения или связи.
В рассматриваемой системе управления входными элементами являются обмотки электропневматических вентилей, управляющих приводом тяговых аппаратов. Исключением являются реле ускорения РУ, имеющее два входных элемента – обмотку в силовой цепи РУ-С и обмотку подъемной катушки РУ-П в цепи управления.
Элементами исполнения тяговых аппаратов являются их силовые контакты, обеспечивающие работу силовых цепей. Исполнительные элементы контроллера машиниста КМ и реле ускорения включены в цепи управления.
К элементам связи относятся блокировки данного аппарата, обеспечивающие требуемый порядок работы аппаратов. Контролер машиниста имеет механические связи между рукоятками ( механические блокировки ).
В структурных схемах систем автоматического регулирования электрические коммутационные аппараты изображаются в виде динамического звена с запаздыванием относительно момента изменения управляющего воздействия на его входе. Поэтому динамическая характеристика аппарата представляет собой ступенчатую функцию, смещенную относительно начала координат на величину запаздывания. Величина запаздывания определяется длительностью электрических и динамических переходных процессов в аппарате и зависит от ряда эксплутационных факторов – напряжения питания цепей управления, давления сжатого воздуха, температуры и так далее.
Для расчетов в курсовой работе принимаются следующие значения времен запаздывания:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.