– исследуемые шумы могут быть либо гармоническим сигналом, либо случайным сигналом с нормальным законом распределения (еще одно ограничение);
– система может быть декомпозирована на следующие подсистемы, каждая из которых может моделироваться отдельно: генератор треугольного сигнала, широтно-импульсный модулятор, амплитудный модулятор, фильтр нижних частот.
Этап формализации модели продолжает процесс абстрагирования (идеализации) модели от реальной системы. Здесь определяются формальные (однозначные, в ряде случаев математические) принципы и законы поведения отдельных элементов системы, что позволяет далее облегчить их программную реализацию.
Например, можно условиться, чтобы при моделировании работы нелинейных элементов (ключей и т.п.) не учитывать время их переключения из одного состояния в другое. В этом случае для программной реализации ключа можно будет использовать обычную условную конструкцию типа if … else. Разумеется, подобные допущения оправданны только тогда, когда они не противоречат целям моделирования.
Таким образом, после построения концептуальной модели и ее формализации разработчик получает в свое распоряжение список требований, ограничений и допущений, которые используются при программной реализации модели системы и способствуют достижению поставленной цели моделирования.
Разработайте подобный список для рассматриваемой модели самостоятельно.
3. Программная реализация модели импульсного умножителя.
В соответствии с концептуальной моделью и формальным описанием отдельных ее элементов приступим к программной реализации. Ниже рассмотрен один из возможных вариантов реализации импульсного умножителя средствами пакета Simulink.
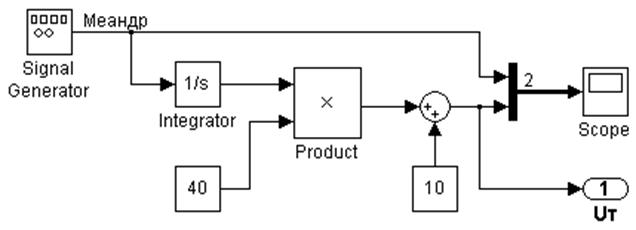
Рис. 3. Генератор сигнала треугольной формы (ГТН)
В показанной на рис. 3 схеме использовался генератор сигналов прямоугольной формы с частотой 10 Гц и амплитудой 10. Обратите внимание, что на рис. 4 схема генератора сигнала треугольной формы преобразована в отдельный блок – подсистему (ГТН – генератор треугольного напряжения). Это можно сделать либо через пункт меню Edit → Create subsystem или с помощью блока Subsystem библиотеки элементов Simulink.
|
|
|
|
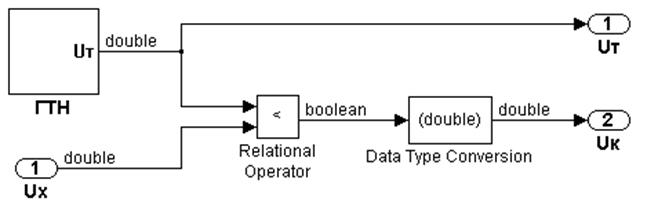
Рис. 4. Широтно-импульсный модулятор (ШИМ)
Обратите внимание и на то,
что некоторые линии сигналов на
рис. 3 и 4 снабжены поясняющими надписями – наименованиями типов передаваемых
данных или размерностью передаваемых данных (данные векторного типа можно также
изображать линиями различных типов и толщины). Такая возможность позволяет
облегчить отладку и использование моделей в Simulink.
|
|
|
|
|
|
|
|
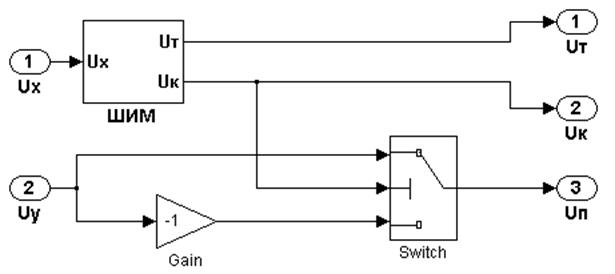
Рис. 5. Амплитудный модулятор (АМ)
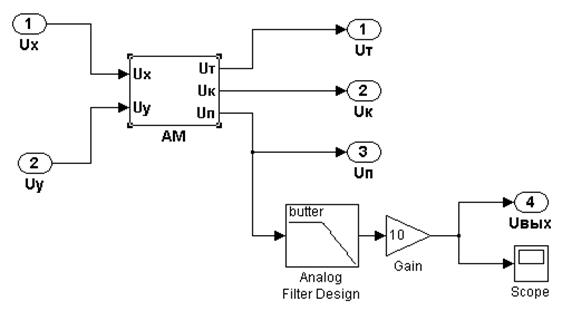
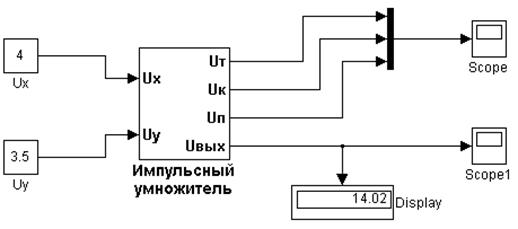
Рис. 6. Импульсный умножитель
Убедитесь в работоспособности умножителя, выполнив моделирование его работы для двух постоянных входных сигналов.
Исследуйте влияние на выходной сигнал параметров моделирования (меню Simulation → Simulation parameters → Solver);
· Время моделирования – параметры вкладки Simulation time,
· Режим модельного времени – параметры вкладки Solver options.
4. Продолжение моделирования импульсного умножителя:
1. Разработайте блок вычисления относительной погрешности умножения. Сравните результат аналогового умножения с результатом умножения в цифровом виде.
2. Выберите параметры фильтра нижних частот (ФНЧ) таким образом, чтобы относительная погрешность не превосходила некоторого заданного значения (шумы на входах отсутствуют).
3. Исследуйте влияние шумов на входах перемножаемых сигналов и на выходе генератора треугольного сигнала на погрешность умножения.
4. Реализуйте вычисление значения функции, заданной преподавателем, с помощью разложения ее в ряд Тейлора, с использованием аналогового умножителя. Сравните полученную погрешность вычисления с погрешностью, получаемой при вычислении значения ряда Тейлора заданной функции в цифровом виде.
5. Реализуйте вычисление значения полинома, заданного преподавателем и найдите его корни.
6. Исследуйте возможности аналогового умножителя при умножении двух сигналов синусоидальной формы. Определите, какие параметры умножителя влияют на погрешность вычислений.
1. Какими параметрами устанавливаются режимы управления модельным временем? В чем заключаются различия между режимами с постоянным и переменным шагом?
2. Чему равен шаг моделирования по умолчанию (в режиме Auto)?
3. Объясните, каким образом вызвать функцию пакета Matlab из модели Simulink.
4. Перечислите основные возможности блоков нелинейной обработки сигналов.
5. Объясните, что произойдет при замене формы треугольного сигнала на пилообразную или синусоидальную.
6. Зачем необходим фильтр нижних частот на выходе умножителя?
7. Как минимизировать длительность переходного процесса на выходе умножителя?
8. Дает ли какие-нибудь преимущества в этой работе использование режима модельного времени с переменным шагом? Ответ обоснуйте.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.