\
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
Федеральное государственное образовательное
учреждение высшего профессиональною образования
«СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ»
ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
СФУ
\
Кафедра «Радиосистемы»
КУРСОВОЙ ПРОЕКТ
СИСТЕМА СЛЕЖЕНИЯ ЗА НАПРАВЛЕНИЕМ
Пояснительная записка
|
|
Красноярск 2008
Выполнил:
ет-т гр. Р 55-3 И. С. Мужайло Проверил: В. Н. Бондаренко
![]() r*
r*

![]() Задание по курсовому проектированию:
Задание по курсовому проектированию:
Цель курсового проектирования - овладение методикой анализа, выбора и расчета основных параметров типовых радиотехнических следящих систем.
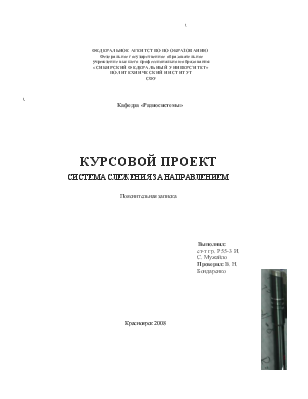
Для всех вариантов задания предлагается общая структурная схема линейной непрерывной следящей системы (рис. 1) и одна и та же
(полиномиальная) модель задающего воздействия x(t) = x0 + xnt + —x0t2, где
л0 - начальное значение задающего воздействия, х0 - начальная скорость изменения задающего воздействия, х0 - начальное ускорение. Для системы слежения за направлением (ССН) параметр xQ имеет размерность град.
|
1 |
/7(/,e |
) |
|||
|
"У\ e |
|||||
|
ОД |
|||||
|
Дк |
|||||
![]() Рис. 1 - Структурная схема следящей системы
Рис. 1 - Структурная схема следящей системы
Специфика варианта задания определяется назначением системы, численными значениями параметров х0, х0 задающего воздействия и коэффициента передачи кп дискриминатора, а также структурой и параметрами динамического звена.
 Изм. I Лист
Изм. I Лист
![]() Разраб.
Разраб.
![]() Проввр.
Проввр.
![]() Реценз.
Реценз.
![]() И. Контр. Утверд.
И. Контр. Утверд.
№докум
Мужайло
Бондаренко
Подпись
Дата
160200 ДФ 210302.65 К24 ПЗ
Системаслеженияза
|
Р55-3 |
направлением. Пояснительнаязаписка
![]()
![]()
![]() Задание по курсовому
проектированию:
Задание по курсовому
проектированию:
Цель курсового проектирования - овладение методикой анализа, выбора и расчета основных параметров типовых радиотехнических следящих систем.
Для всех вариантов задания предлагается общая структурная схема линейной непрерывной следящей системы (рис. 1) и одна и та же
(полиномиальная) модель задающего воздействия x(t) = x0 +xot + -xnt2, где
л0 - начальное значение задающего воздействия, х0 - начальная скорость изменения задающего воздействия, х0 - начальное ускорение. Для системы слежения за направлением (ССН) параметр х0 имеет размерность град.
|
|
![]()
![]() Рис. 1 - Структурная схема следящей
системы
Рис. 1 - Структурная схема следящей
системы
Специфика варианта задания определяется назначением системы, численными значениями параметров х0, х0 задающего воздействия и коэффициента передачи ка дискриминатора, а также структурой и параметрами динамического звена.
Дата |
 Изм. Лист
Изм. Лист
![]() Разраб.
Разраб.
![]() Провер.
Провер.
![]() Реценз.
Реценз.
![]() Н. Контр. Утверд.
Н. Контр. Утверд.
№докум
Мужайло
Бондаренко
Подпись
160200 ДФ 210302.65 К24 ПЗ
Системаслеженияза
|
Р55-3 |
направлением. Пояснительнаязаписка
|
|
ГЧ•&, •*
■\\
![]() Исходныеданные:
Исходныеданные:
'Я
|
Согласно варианту №24: Тип следящей системы: ССН. Параметры задающего воздействия: хо= 2,2 град/с. Коэффициент передачи дискриминатора: кл = 1,5 В/град. Спектральная плотность шума: Nn = 0,02 Вт/Гц. Параметры динамического звена:
число интеграторов к = 1, ки~ общий коэффициент передачи к интеграторов, порядок дифференциального уравнения п = 2, число форсирующих звеньев m = 1, число инерционных звеньев п - к = 1, 7; =0,06 с, Г2=5,6с.
Область применения: радиолокационная система (РЛС) автосопровождения по направлению с использованием фазированной антенной решетки (ФАР).
|
|
|
160200ДФ210302.65К24ПЗ |
|
№докум. IПодгшсь\Дата |
|
|
\
V
*. \
|
X |
V '44V
![]()
![]() Исходные данные:
Исходные данные:
 Согласно
варианту №24: Тип следящей системы: ССН. Параметры задающего воздействия: хо=
2,2 град/с. Коэффициент передачи дискриминатора: ка = 1,5 В/град. Спектральная
плотность шума: Nn = 0,02 Вт/Гц. Параметры динамического
звена: число
интеграторов к = 1, ки— общий коэффициент передачи к
интеграторов,
Согласно
варианту №24: Тип следящей системы: ССН. Параметры задающего воздействия: хо=
2,2 град/с. Коэффициент передачи дискриминатора: ка = 1,5 В/град. Спектральная
плотность шума: Nn = 0,02 Вт/Гц. Параметры динамического
звена: число
интеграторов к = 1, ки— общий коэффициент передачи к
интеграторов,
порядок дифференциального уравнения п = 2,
число форсирующих звеньев m = 1,
число инерционных звеньев п - к = 1,
Тх = 0,06 с,
Г2=5,6с.
Область применения: радиолокационная система (РЛС) автосопровождения
|
160200ДФ 210302.65К24ПЗ_ |
по направлению с использованием фазированной антенной решетки (ФАР).
X
%
/
![]() 1 Определение передаточных
функций разомкнутой системы ), а также замкнутой системы КДр);
спектральной плотности N.t эквивалентных
флуктуации, приведенных ко входу дискриминатора.
1 Определение передаточных
функций разомкнутой системы ), а также замкнутой системы КДр);
спектральной плотности N.t эквивалентных
флуктуации, приведенных ко входу дискриминатора.
= -*-+ |
Передаточная функция динамического звена: К(р) = -*-
р{\ + Т2р)
Передаточная функция разомкнутой системы: К {р) = -^-^------ —.
" р (1 + 7»
Передаточная функция замкнутой системы:
каК(р) ^ ЛР)1 + kJCip) где к к =К],с~] - усиление разомкнутой системы или добротность системы
по скорости.
Спектральная плотность эквивалентного шума:
V
![]()
![]() % Сл,
% Сл,

к
![]() 1 Определение передаточных функций
разомкнутой системы ), а также замкнутой системы &',(/;); спектральной
плотности jV., жвивалентных
флуктуации, приведенных ко входу дискриминатора.
1 Определение передаточных функций
разомкнутой системы ), а также замкнутой системы &',(/;); спектральной
плотности jV., жвивалентных
флуктуации, приведенных ко входу дискриминатора.
? •»
![]() Передаточная функция динамического звена: К(р)
= —-------------------------------------------------------------------------------- —.
Передаточная функция динамического звена: К(р)
= —-------------------------------------------------------------------------------- —.
(1 + 7>)
![]()
![]() Передаточная функция разомкнутой системы: К
(р) =----------
Передаточная функция разомкнутой системы: К
(р) =---------- д
" '—-.
" р {\ + Т)
Передаточная функция замкнутой системы:
kRK(p)
ЛР)\ +
где к ки =К1,с~1 - усиление разомкнутой системы или добротность системы
по скорости.
Спектральная плотность эквивалентного шума:
Вт град2 Гц В2 '
V
X
\
|
|
|
|
|
160200 ДФ 2W302.65 K24JT3 |
■ь.
\
![]()
![]() 2 Оптимизация следящей системы по
параметру *„ используя критерии максимума среднего квадрата ошибки; определение оптимального
значения шумовой полосы /^„системы и минимально достижимой ошибки
слежения ,mn; построение графиков зависимостей результирующей средней
квадратической ошибки слежения, а также ее составляющих
(динамической и шумовой) от полосы.
2 Оптимизация следящей системы по
параметру *„ используя критерии максимума среднего квадрата ошибки; определение оптимального
значения шумовой полосы /^„системы и минимально достижимой ошибки
слежения ,mn; построение графиков зависимостей результирующей средней
квадратической ошибки слежения, а также ее составляющих
(динамической и шумовой) от полосы.
\
|
В зависимости от характера воздействия x(t) (детерминированное или случайное) точность следящих систем в условиях действия помех оценивается либо средним квадратом либо дисперсией, в нашем случае средним квадратом ё"2 = е\ + о2еп. Значение динамической ошибки ел
определяет математическое ожидание (среднее значение) ошибки слежения при детерминированном воздействии.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.