|
|
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ Федеральное государственное образовательное учреждение высшего профессионального образования «Сибирский федеральный университет» |
Кафедра «Радиосистемы»
Системы слежения за задержкой сигнала,
Системы слежения за направлением прихода сигнала
Радиотехнический факультет
19.11.2007 г.
Содержание
Тема 5: «Системы слежения за задержкой сигнала»
1. Функциональная схема ССЗ псевдослучайного ФМ-сигнала
2. Формирование дискриминационной характеристики
3. Система тактовой (символьной) синхронизации демодулятора цифровых сигналов
4. Структурная схема системы слежения за задержкой
1. Амплитудный пеленгатор, использущий суммарно-разностный метод пеленгования
2. Структурная схема ССН
Тема 5:«Системы слежения за задержкой сигнала»
Рис. 5.4 – Временные диаграммы для ССЗ
Функциональная схема ССЗ псевдослучайного ФМ-сигнала
Рис. 5.5
ВД – временной дискриминатор (состоит из двух каналов); ПФ – полосовой фильтр; АД – амплитудный детектор S+, S– – опережающая и запаздывающая копии опорной ПСП; ГПСП – генератор псевдослучайной последовательности; УТГ – управляемый тактовый генератор.
Формирование дискриминационной характеристики
|
Рис. 5.6 |
U1, U2 – выходные напряжения каналов 1 и 2.
|
Система тактовой (символьной) синхронизации демодулятора цифровых сигналов
|
|
|
|
Рис. 5.7 |
Рис. 5.9 |
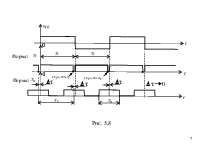
S(t) – двоичный сигнал (последовательность символов ±1); Дм – демодулятора; СТС – система тактовой синхронизации; ФИ – формирователь интервалов; РУ – решающее устройство; Т0 – длительность опорного импульса; Тc – длительность интервала интегрирования.
Рис. 5.8
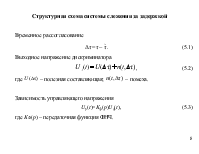
Структурная схема системы слежения за задержкой
Временное рассогласование
 . (5.1)
. (5.1)
Выходное напряжение дискриминатора
 , (5.2)
, (5.2)
где  – полезная составляющая;
– полезная составляющая;  – помеха.
– помеха.
Зависимость управляющего напряжения
Uу(t)=Kф(p)Uд(t), (5.3)
где KФ(p) – передаточная функция ФНЧ.
Регулировочная характеристика схемы управляемой задержки
 , (5.4)
, (5.4)
где  – значение
задержки Uу=0,
– значение
задержки Uу=0,
 –
крутизна регулировочной характеристики (коэффициент передачи СУЗ, имеющая
размерность мкс/В.
–
крутизна регулировочной характеристики (коэффициент передачи СУЗ, имеющая
размерность мкс/В.
Аппроксимиация зависимости U(Dt) при малых рассогласованиях Dt
 , (5.5)
, (5.5)
где
 .
.
|
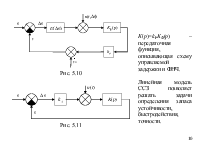
Рис. 5.10
Рис. 5.11 |
К(p)=kPKФ(p) – передаточная функция, описывающая схему управляемой задержки и ФНЧ. Линейная модель ССЗ позволяет решать задачи определения запаса устойчивости, быстродействия, точности. |
Угломерные следящие системы.
Используются в:
· радиолокации (для автоматического сопровождения по направлению),
· радионавигации (амплитудные и фазовые пеленгаторы),
· радиоуправлении (наведение управляемых снарядов, ракет на цели),
· радиосвязи (наведение приёмных антенн космических систем связи).
Амплитудный пеленгатор, использущий суммарно-разностный метод пеленгования.
О1 и О2 – облучатели; ВМ – волноводный мост; uc(t), uр(t) – суммарный и разностный сигналы; ФД – фазовый детектор; ucп(t) – опорное колебание; РСН – равносигнальное направление; ИД – исполнительный двигатель; Uу – управляющее напряжение.
|
Диаграмма направленности антенны |
Дискриминационная характеристика |
Рис. 6.2
f1(a) и f2(a) – так называемые парциальные диаграммы; a – угловое рассогласование; D/l – относительный размер антенны (D – диаметр отражателя, l – длина волны).
Угловое рассогласование
 .
(6.1)
.
(6.1)
где aц – азимут (пеленг) цели, ![]() – оценка азимута.
– оценка азимута.
Напряжение на выходе УД (углового дискриминатора)
Uд(t)=U(a)+n(t,a), (6.2)
где U(a) –дискриминационная характеристика; n(t,a) – помеха.
U(a)=kфUpп(t,a)Ucп(t). (6.3)
 (6.4)
(6.4)
U0 – амплитуда сигнала на выходе суммарного канала; Up(a)и Uc(a) – зависимости амплитуды сигнала на входе от a соответственно для разностного и суммарного каналов; fp(a)=f2(a) – f1(a) и fc(a)=f1(a)+f2(a).
 . (6.5)
. (6.5)
Управляющее напряжение
Uу(t)=kуUд(t), (6.6)
 ,
,
где Wд(t) – управляемая переменная (скорость вращения ротора двигателя); kд – коэффициент передачи, рад/сВ; Тд – постоянная времени.
 , (6.7)
, (6.7)
где
 , (6.8)
, (6.8)
где kP – коэффициент передачи редуктора (интегрирующего звена).
 . (6.9)
. (6.9)
Структурная схема ССН
Рис. 6.3
 . Линейная модель ССН: задачи
определения запаса устойчивости, качества переходного процесса (быстродействия,
перерегулирования), точности слежения.
. Линейная модель ССН: задачи
определения запаса устойчивости, качества переходного процесса (быстродействия,
перерегулирования), точности слежения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.


 – временное рассогласование.
– временное рассогласование.